Allgemein
Auszüge aus Beckhoff Information System:
Die TwinCAT 3 Usermode Runtime ermöglicht die Ausführung eines TwinCAT Programms ohne die tiefe TwinCAT-Betriebssystem-Integration, die nötig wäre, um die Echtzeit-Ausführung sicherzustellen. Dies ist bei neueren Betriebssystemen nur schwer oder gar nicht möglich, ohne Beeinträchtigung der anderen Komponenten.
Dafür wird der gleiche Programmcode des Kundenprojektes ausgeführt allerdings ohne die Echtzeitanforderungen zu erfüllen.
Limitierungen
•Die TwinCAT 3 Usermode Runtime stellt eine Ausführungsumgebung für den gleichen Programmcode bereit, welcher auch in der Echtzeit Runtime ausgeführt wird.
•Die TwinCAT 3 Usermode Runtime hat keine garantierten deterministischen Ausführungseigenschaften. Das Betriebssystem ist in jeder Zeit in der Lage die Usermode Runtime zu unterbrechen.
•Die TwinCAT 3 Usermode Runtime hat keinen Zugriff auf EtherCAT. Der IO-Teil der Konfiguration wird also im Normalfall „disabled“.
•Komponenten, die auf den Realtime-Ethernet-Treiber aufbauen, können ausgeführt werden. Die Ausführungszeiten, sowie der Jitter können die Funktion prinzipienbedingt beeinträchtigen.
•CCAT-basierte Netzwerkkarten können nicht genutzt werden.
•Die TwinCAT 3 Usermode Runtime kann nicht auf USB zugreifen, womit z. B. der Lizenz-USB-Stick nicht verwendet werden kann.
•Prinzipienbedingt ist es auch nicht sinnvoll alle TwinCAT Functions unter einer TwinCAT 3 Usermode Runtime zu nutzen. Einige TwinCAT Functions benötigen beispielsweise einen konstanten Echtzeit-Tick.
•Wenn sinnvoll, werden TwinCAT 3 Functions erweitert, um mit der TwinCAT 3 Usermode Runtime zu funktionieren. Insbesondere falls für die TwinCAT 3 Usermode Runtime in Bezug auf die Konfiguration etwas beachtet werden muss, ist dieses bei den jeweiligen Produkten dokumentiert.
•Die Ausführungsreihenfolge zwischen den Tasks kann sich prinzipienbedingt von dem Verhalten in der Echtzeit-Runtime unterscheiden.
•Es ist auch aus diesem Grund sinnvoll die Ausführungsreigenfolge nicht von den Task-Prioritäten abhängig zu machen.
Starten der User Mode Runtime
In der aktuellen TwinCat Version 4024.56 wird die User Mode Runtime über ein Batchfile gestartet. Dieses befindet sich üblicherweise unter "C:\TwinCAT\3.1\Runtimes\UmRT_Default\Start.bat".
Öffnen des CMD und zum Verzeichnis navigieren, hierfür den Befehl "cd C:\TwinCAT\3.1\Runtimes\UmRT_Default\" im CMD Window eingeben.
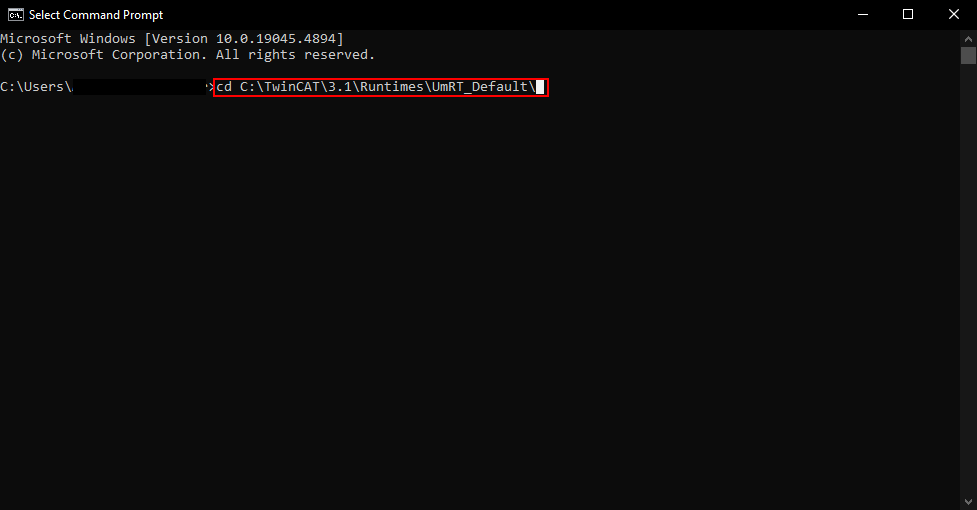
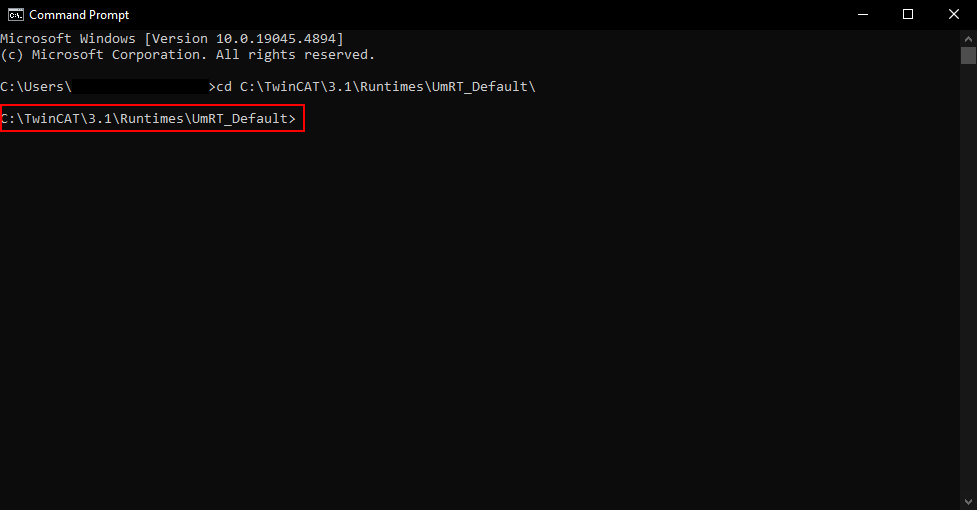
Mit Eingabe der Enter-Taste wird der Pfad geöffnet:
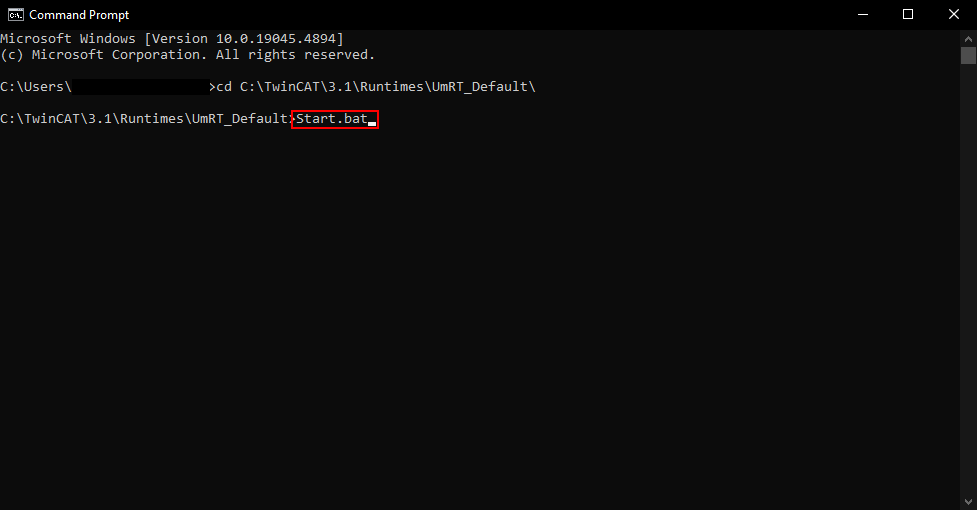
Batch Datei mit der Eingabe "Start.bat" und Enter starten:
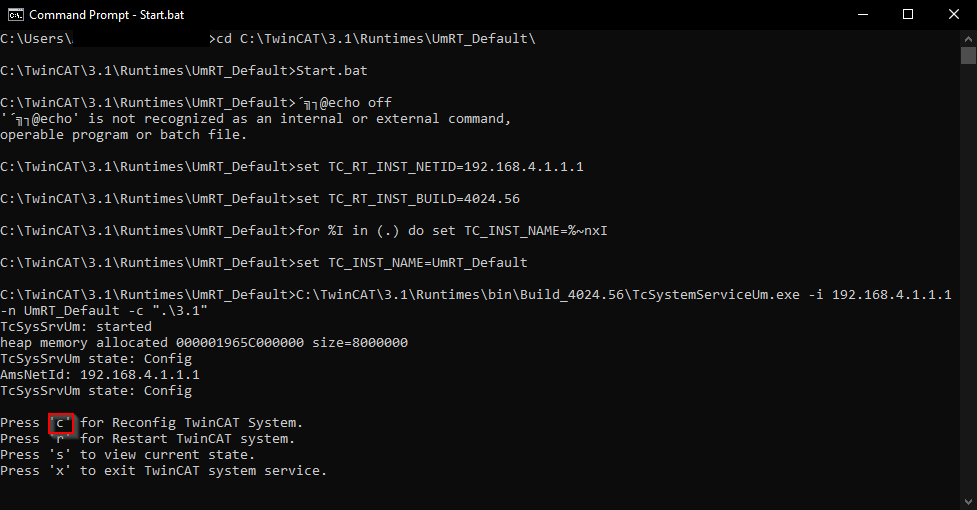
Batch Datei wird geöffnet diese muss noch mit der Eingabe "c" gestartet werden:
Danach ist im TwinCat XAE unter Zielsysteme die Option „UmRT_Default“ anwählbar sein:
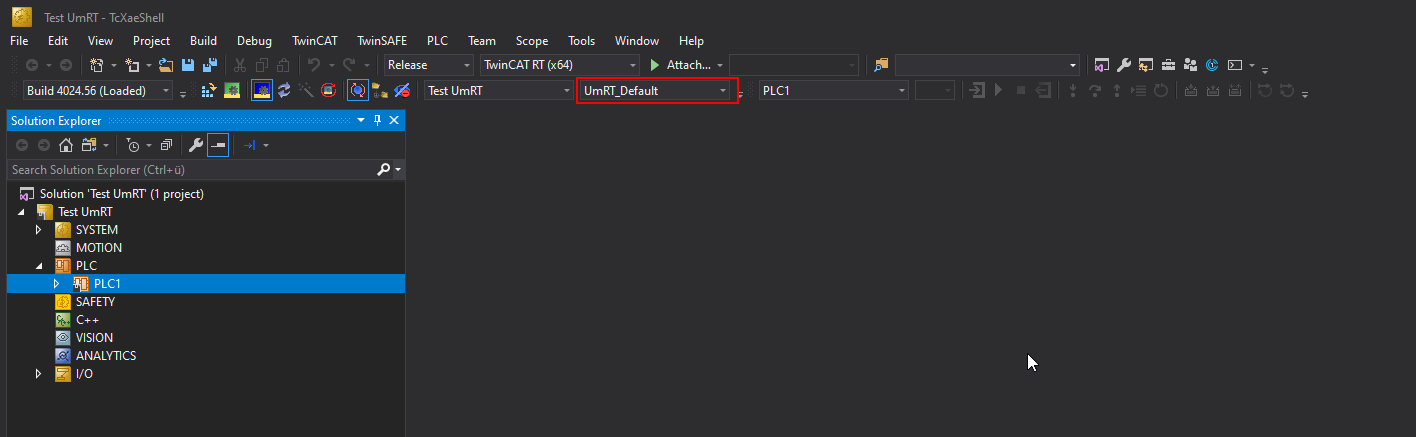
Es kann anschließend die Konfiguration aktiviert (![]() ) und die Runtime gestartet werden.
) und die Runtime gestartet werden.
Das Zielsystem hat nun die NetId: 192.168.4.1.1.1
Diese NetId muss im Selmo Studio unter ‚Target System‘ eigegeben werden, um die erfolgreiche Verbindung mit der HMI herzustellen. Der Haken bei „TwinCAT PLC local“ muss entfernt werden.
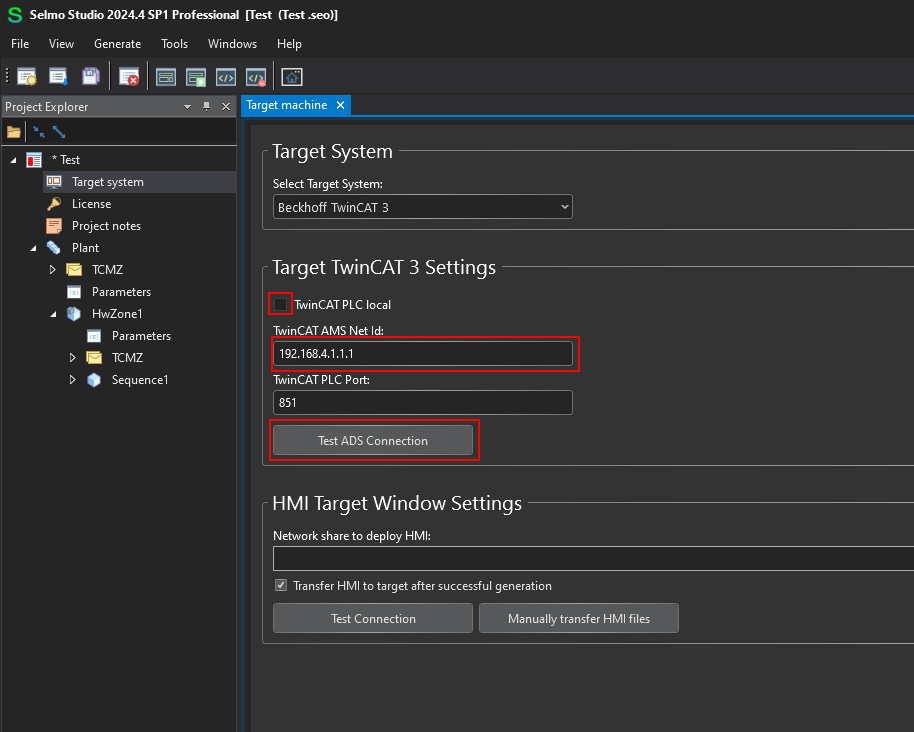
Anschließend kann mit einem Klick auf „Test ADS Connection“ die Verbindung geprüft werden (die Runtime muss sich im Zustand RUN befinden). Wenn eine positive Meldung angezeigt wird, kann die HMI exportiert und gestartet werden.

Die Usermode Runtime kann jetzt mit den bereits erwähnten Einschränkungen verwendet werden.