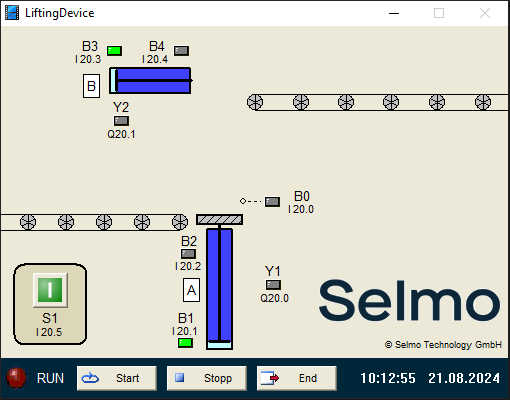
A package is transported - from the lower roller conveyor (left) to the end of the upper roller conveyor (right). A lifting and ejection device is used to transport the goods to the other level. These devices each consist of a pneumatic cylinder with limit switches. A parts check is located directly in the lifting station. The package is released via the visualization.
Input/output assignment
The inputs and outputs of the model are assigned as follows (the designation input or output refers to the connected control unit)
refers to the connected control unit):
Input no. Name TwinCat variable name Description
1 S1 I_S1 Start button (NC contact)
2 B0 I_B0 Sensor package present (normally open contact)
3 B1 I_B1 Limit switch cylinder 1 retracted (NO contact)
4 B2 I_B2 Limit switch cylinder 1 extended (NO contact)
5 B3 I_B3 Limit switch cylinder 2 retracted (NO contact)
6 B4 I_B4 Limit switch cylinder 2 extended (NO contact)
Output no. Name TwinCat variable name Description
1 Y1 O_Y1 Extend spring-return cylinder 1
2 Y2 O_Y2 Extend spring-loaded cylinder 2
3 M1 O_M1 Conveyor belt motor