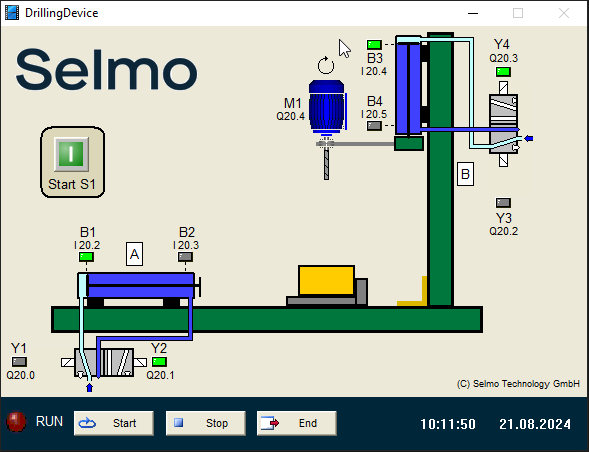
The drilling device model is a simple drilling device that enables the automatic clamping and drilling of workpieces. After pressing the start button, cylinder A first clamps the workpiece. After clamping the workpiece, the drive motor M1 of the drilling machine is switched on and the machine is then moved into the workpiece via cylinder B. After the drilling process is complete, cylinder B retracts first and then cylinder A retracts again after the motor is switched off.
Input/output assignment
The inputs and outputs of the model are assigned as follows (the designation input or output refers to the connected control unit)
refers to the connected control unit):
Input no. Name TwinCat variable name Description
1 S1 I_S1 Start button (NO contact)
2 B1 I_B1 Limit switch cylinder 1 retracted (NO contact)
3 B2 I_B2 Limit switch cylinder 1 extended (NO contact)
4 B3 I_B3 Limit switch cylinder 2 retracted (NO contact)
4 B4 I_B4 Cylinder 2 limit switch extended (NO contact)
Output no. Name TwinCat variable name Description
1 Y1 O_Y1 Cylinder 1 extended
2 Y2 O_Y2 Retract cylinder 1
3 Y3 O_Y3 Extend cylinder 2
4 Y4 O_Y4 Retract cylinder 2
5 M1 O_M1 Motor drill