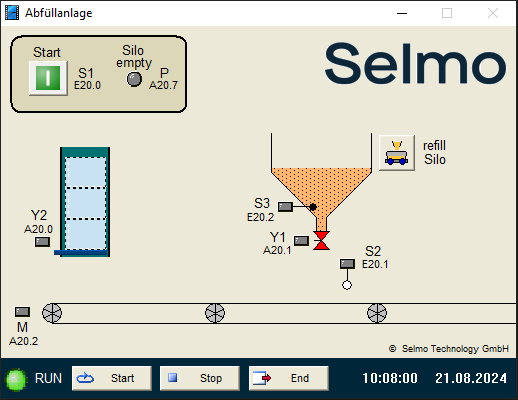
The automatic filling process is started via switch S1. An empty container is fed from the drop magazine onto the conveyor belt, which is driven by motor M, via a pulse at enable output Y2. If the container is under the silo, sensor S2 supplies a logical ON signal and the belt stops. When valve Y1 is opened, the container should then be filled for 3 seconds. The belt then starts again and a new empty container is placed on the belt. Sensor S3 supplies an ON signal when the silo is no longer sufficiently full. In this case, the belt should stop and the warning lamp P should light up. The silo can be refilled using the fill button to the right of the silo. After the system is switched off, the belt should continue to run for 3 seconds to remove any remaining containers.
Input/output assignment
The inputs and outputs of the model are assigned as follows (The designation input or output refers to the connected control unit.
refers to the connected control unit):
Input no. Name TwinCat variable name Description
1 S1 I_S1 On/Off switch
2 S2 I_S2 Sensor container under silo (NO contact)
3 S3 I_S3 Sensor silo empty (NO contact)
Output no. Name TwinCat variable name Description
1 Y1 O_Y1 Silo valve dosing
2 Y2 O_Y2 Release flap container
3 M O_M Conveyor belt motor
4 P O_P Silo empty warning lamp