Starten Sie TwinCAT XAE:
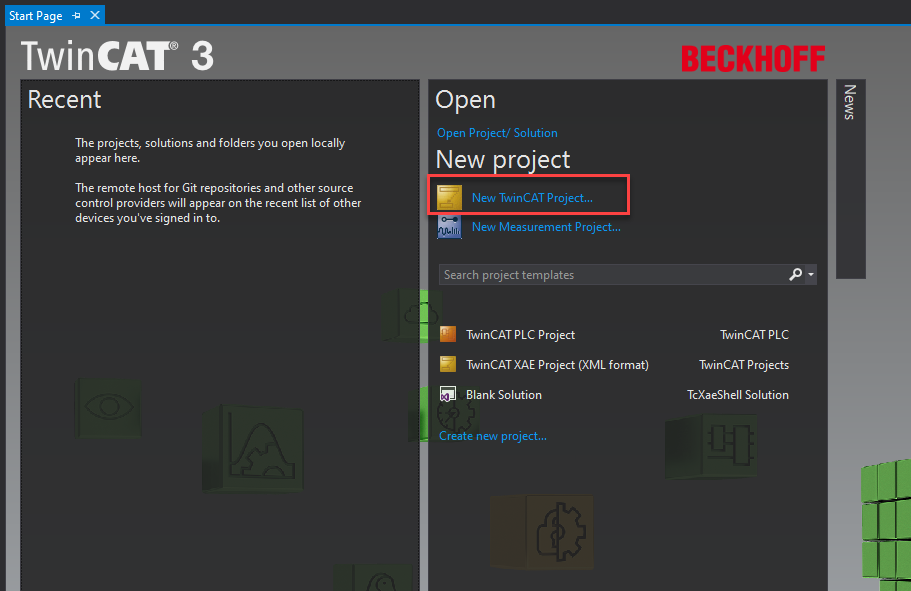
Öffnen Sie „Neues TwinCAT Projekt“
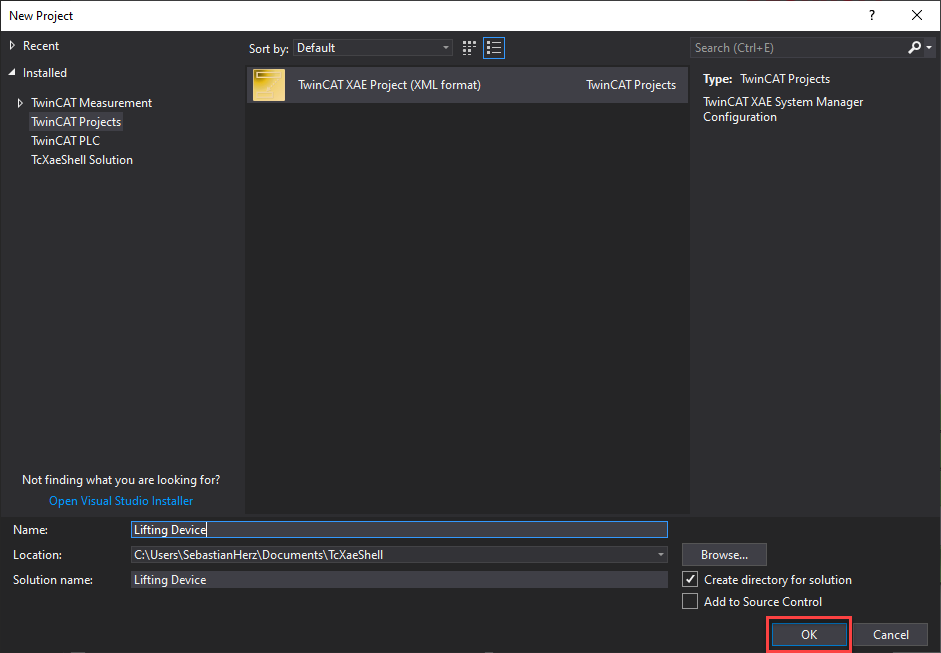
Erstellen Sie ein „TwinCAT XAE Projekt“:
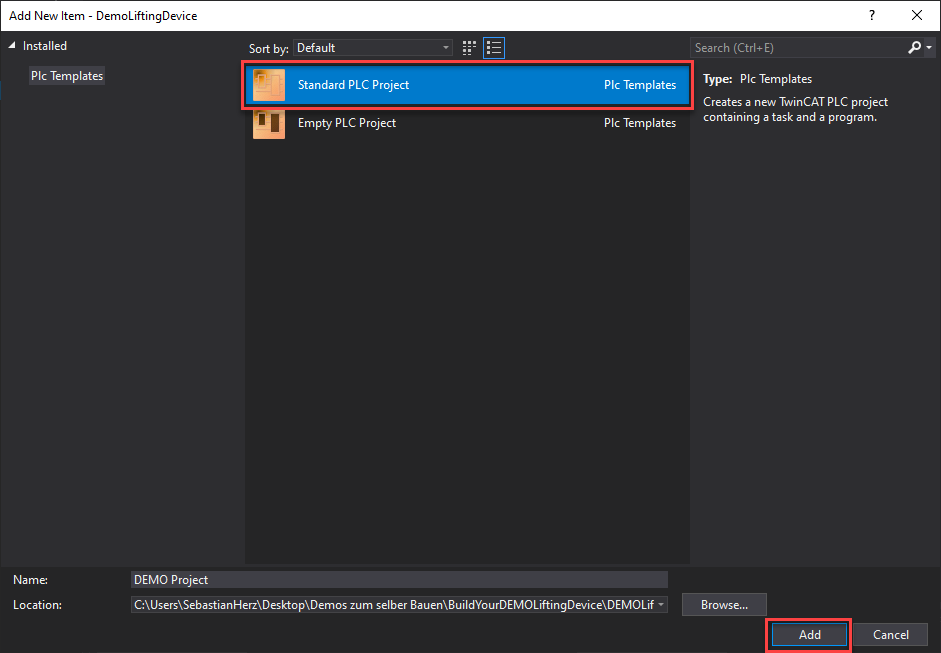
Jetzt müssen Sie ein neues SPS-Projekt erstellen:
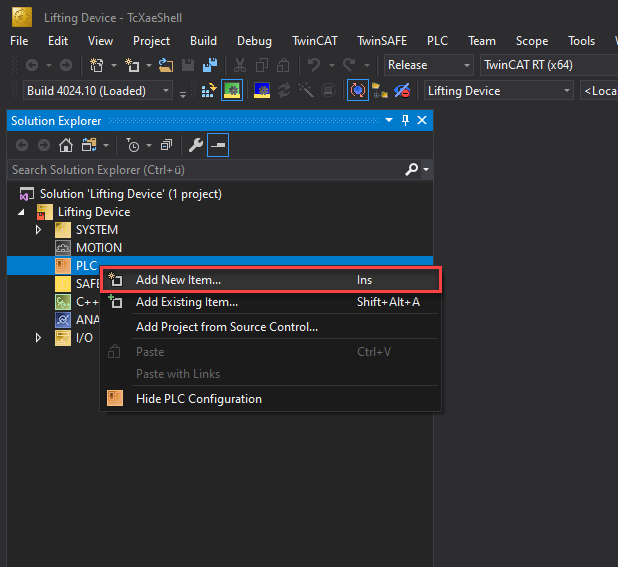
Fügen Sie ein „Standard-SPS-Projekt“ hinzu:
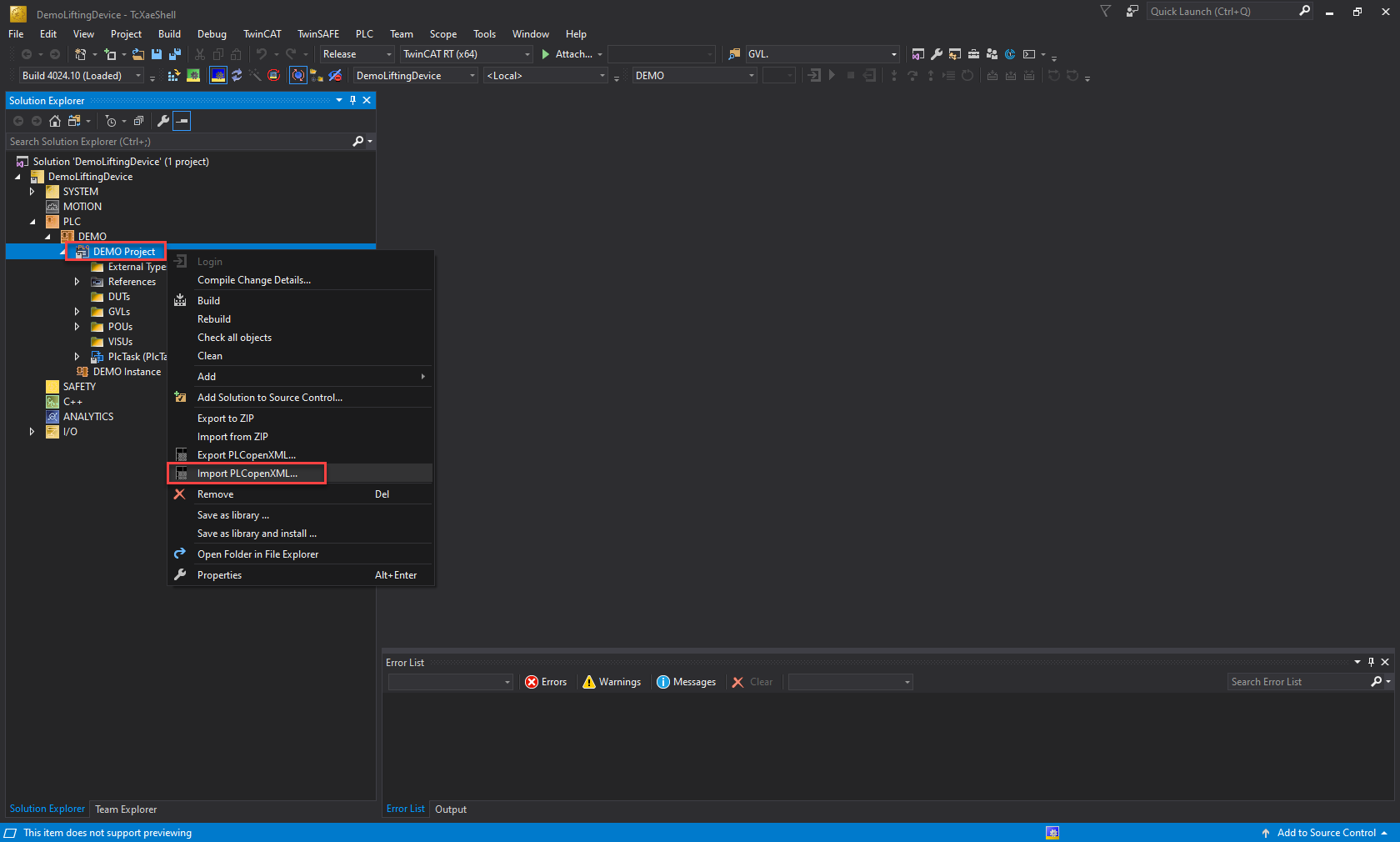
Jetzt müssen Sie die PLCopenXML-Datei aus Selmo studio importieren:
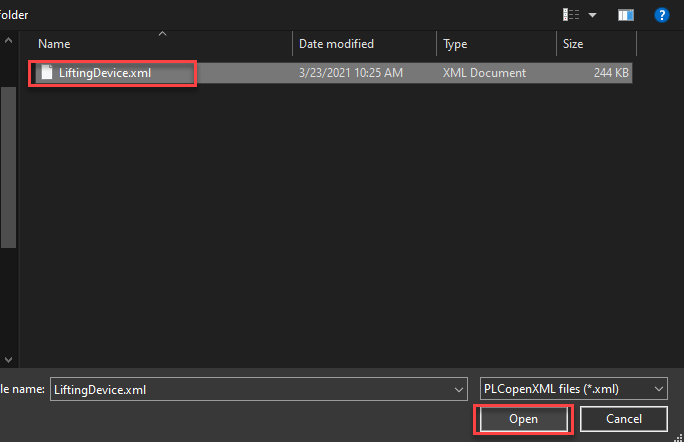
Öffnen Sie die .xml Datei.
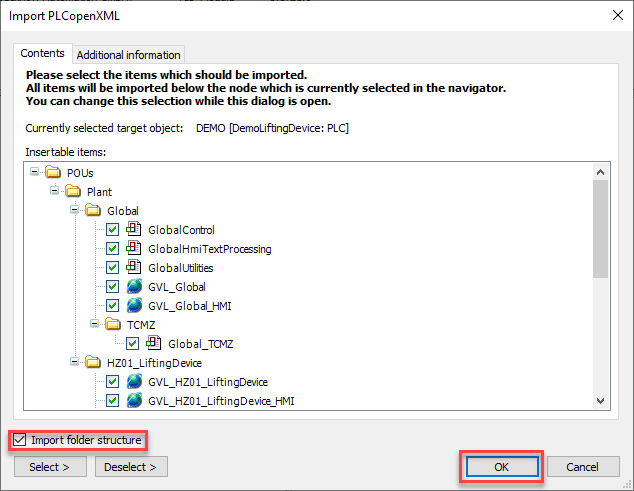
Clicken Sie auf OK.
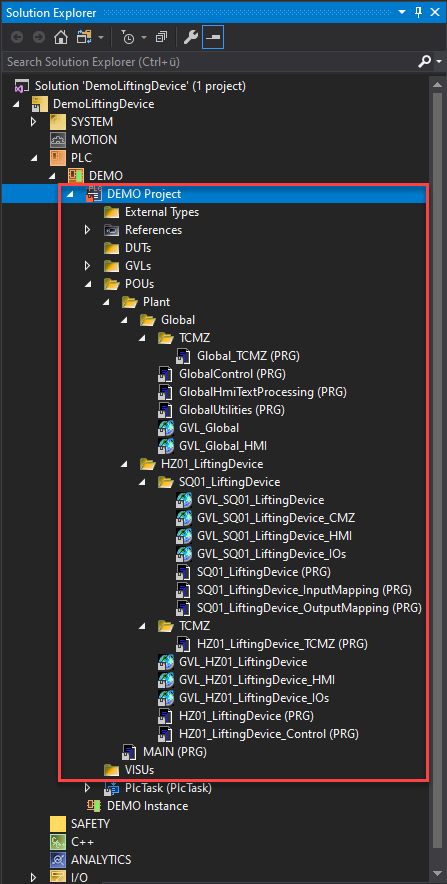
Das Projekt wurde geöffnet:
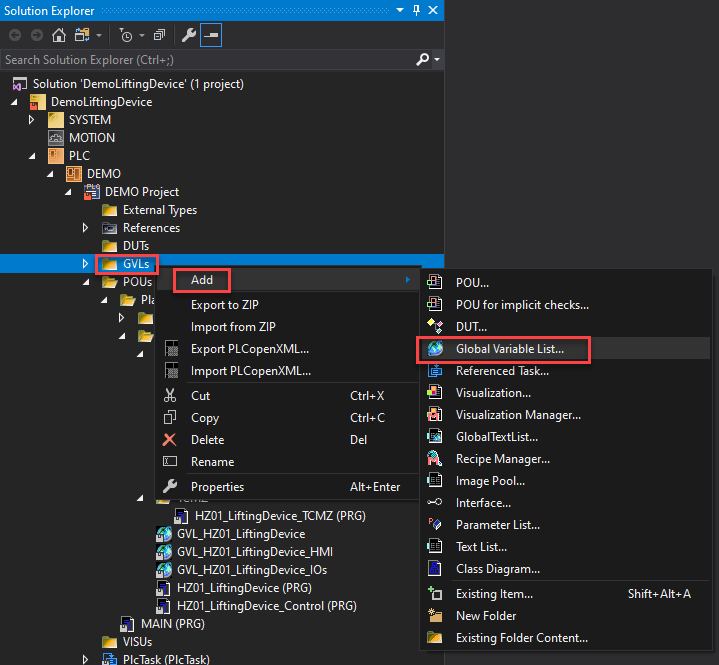
Fügen Sie eine globale Variablenliste für Ihre Eingänge und Ausgänge hinzu.
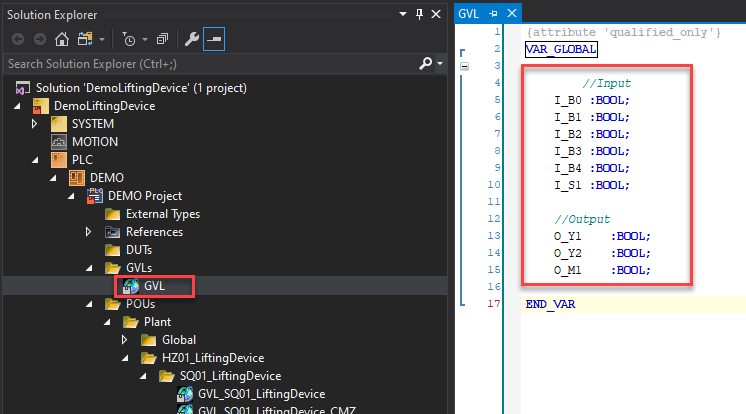
Schreiben Sie Ihre Ein- und Ausgänge. (In diesem Fall haben wir die E / A von unserer HMI verwendet.)
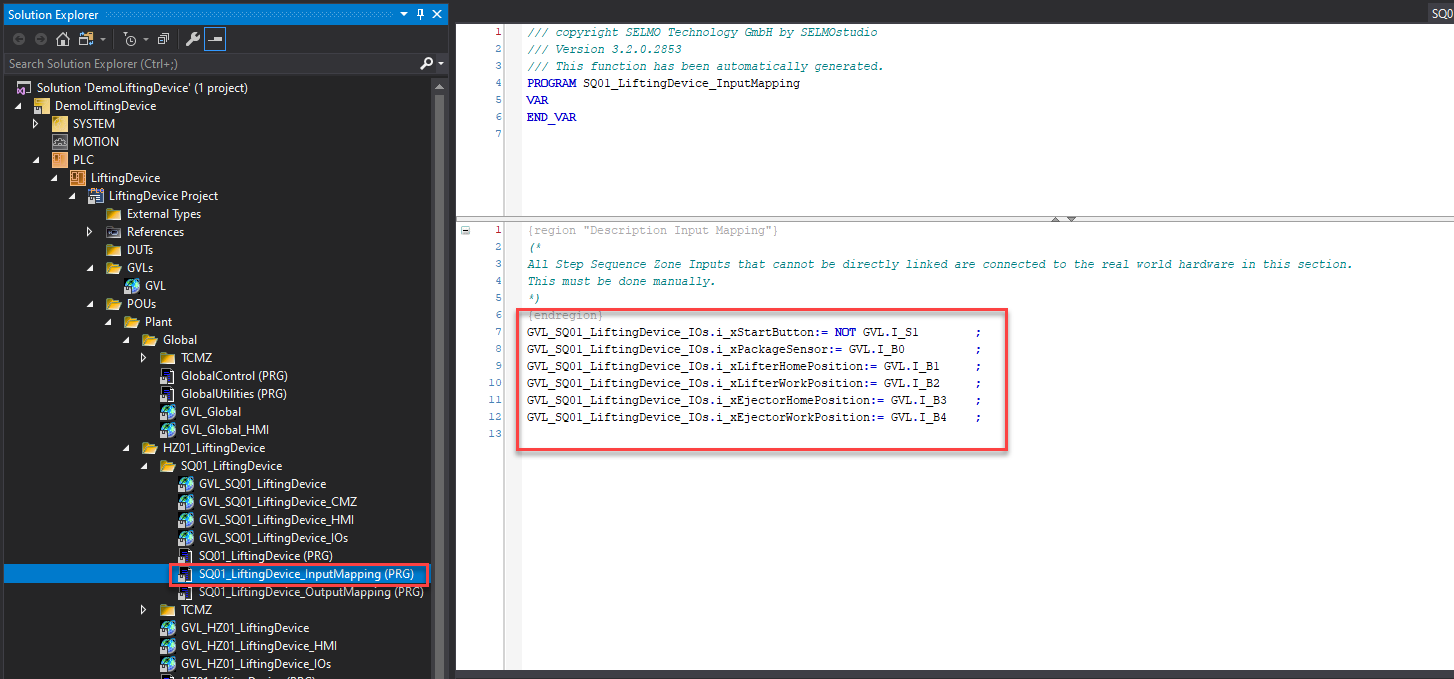
Nun müssen Sie das In/ und Output Mapping schreiben
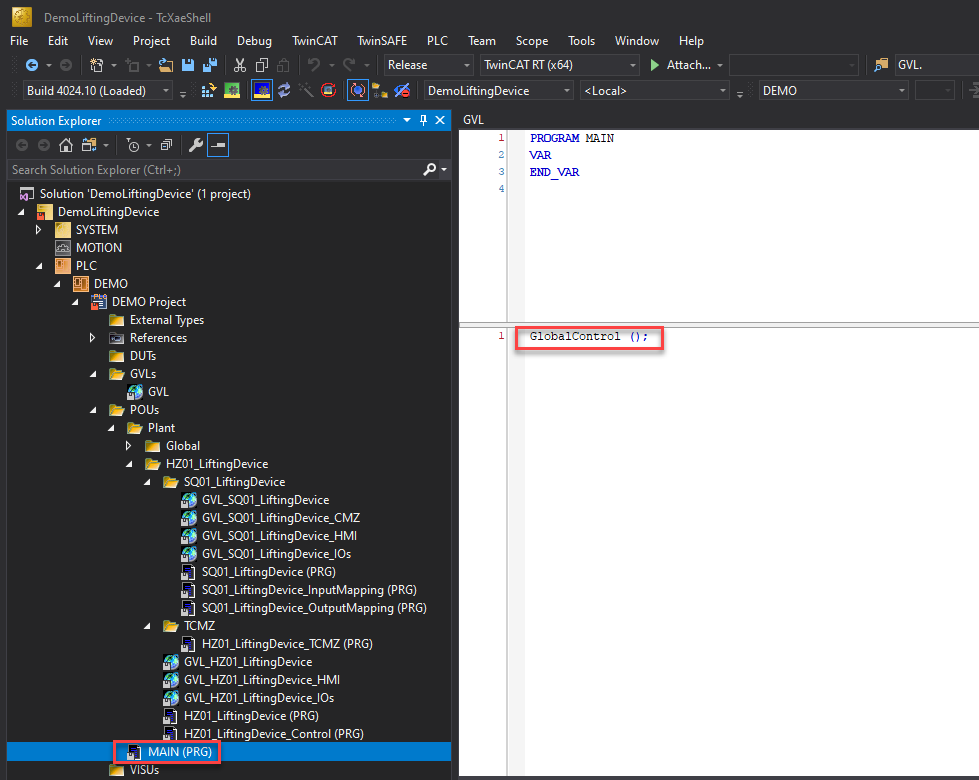
Öffnen Sie „MAIN (PRG)“ und schreiben Sie den Aufruf „GlobalControl ();“
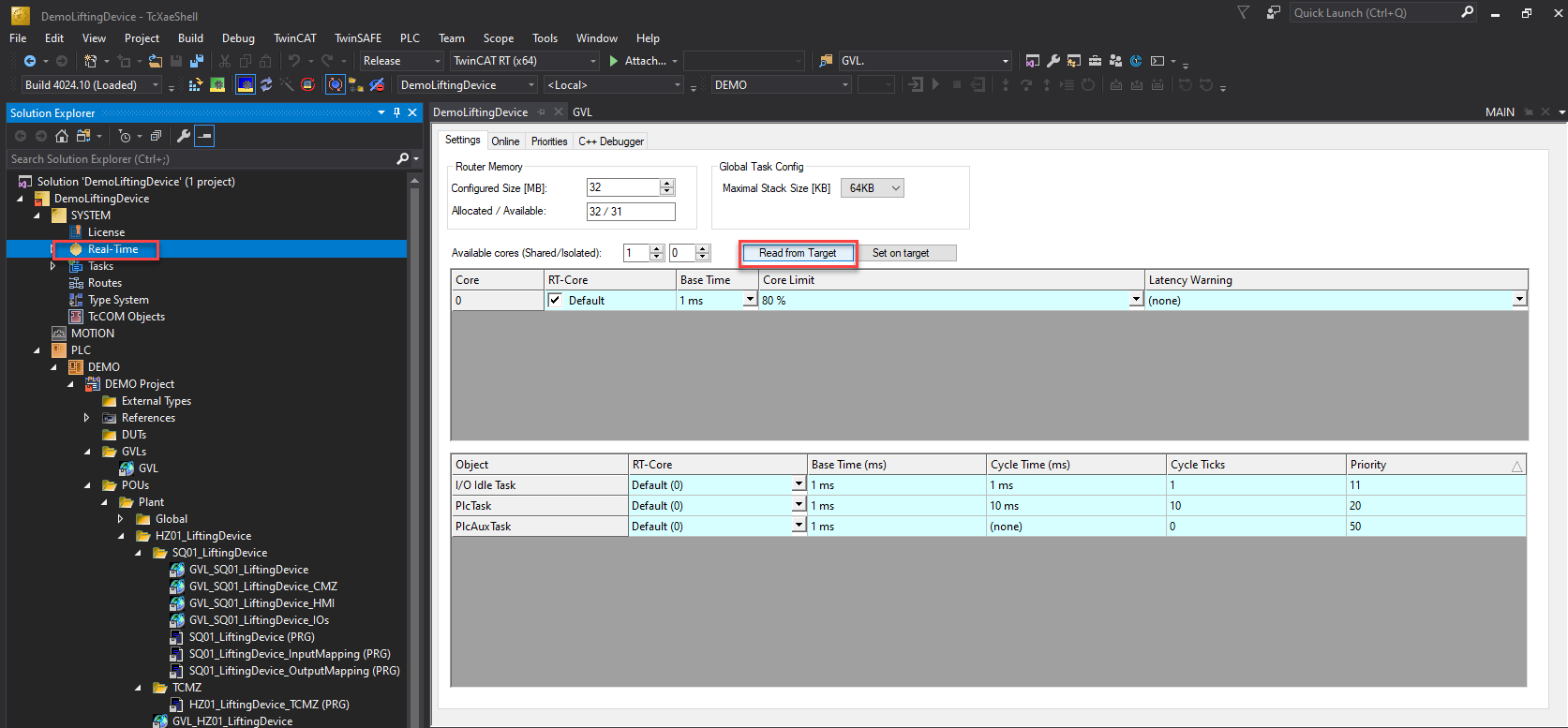
Gehen Sie anschließend zu „System … Real-Time“ und konfigurieren Sie Ihre lokale Steuerung (SPS).
Lesen Sie zunächst die Anzahl der verfügbaren Kerne auf Ihrem System. (Drücken Sie „Read from Target“)
Es sollten mindestens 2 Kerne vorhanden sein, um eine stabile Laufzeit zu erhalten. In unserem Fall hat das System 8 Kerne von 0-7.
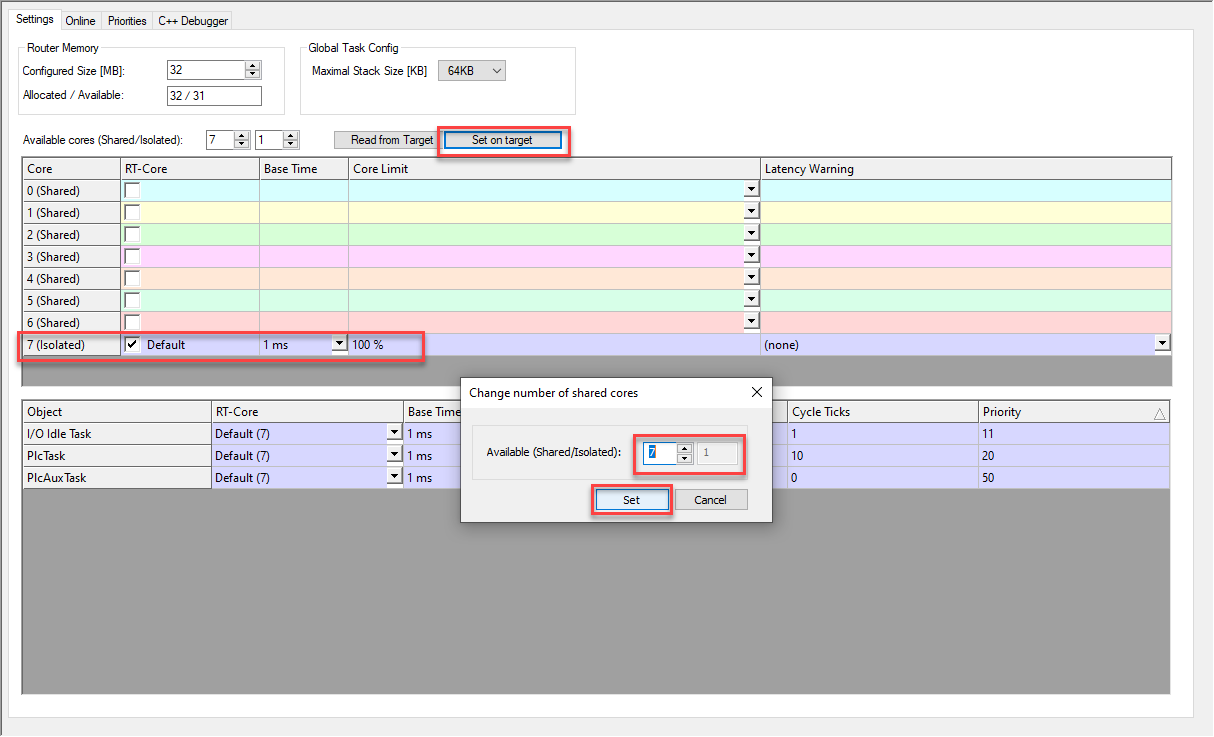
Der letzte Kern muss isoliert werden: (Clicken Sie auf „Set on target“)
Es sollte auch überprüft werden, ob die aktuelle "Selmo Basic" Bibliothek bereits installiert ist.
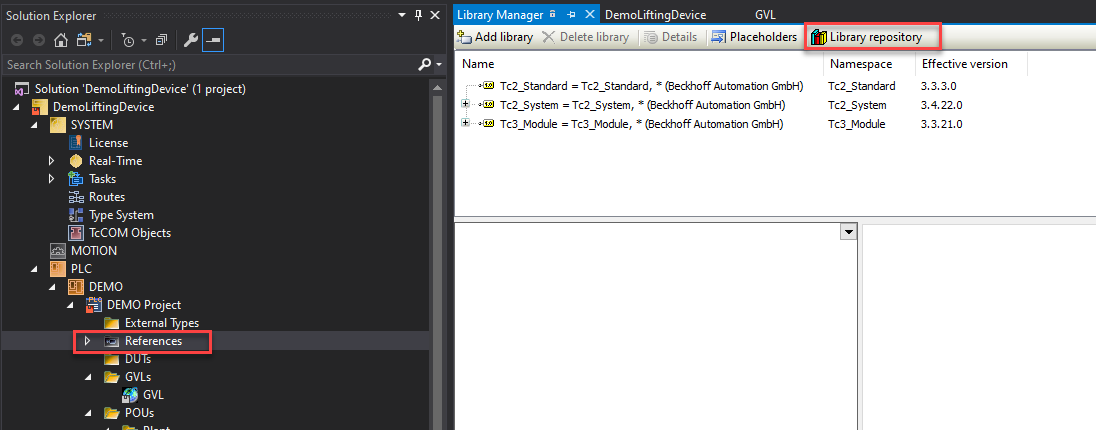
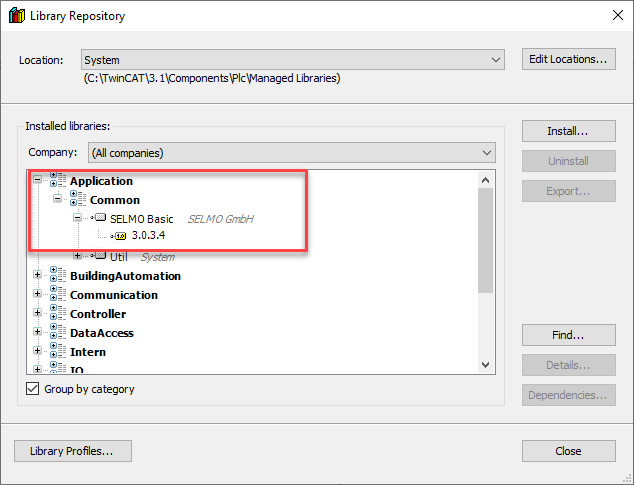
Wenn Sie die Selmo Basic-Bibliothek noch nicht installiert haben, befolgen Sie bitte die Anweisungen unter „Einstellungen in TwinCAT“.
Wenn Sie die Bibliothek bereits installiert haben, fügen Sie die Selmo Basic-Bibliothek in Ihr Projekt ein:
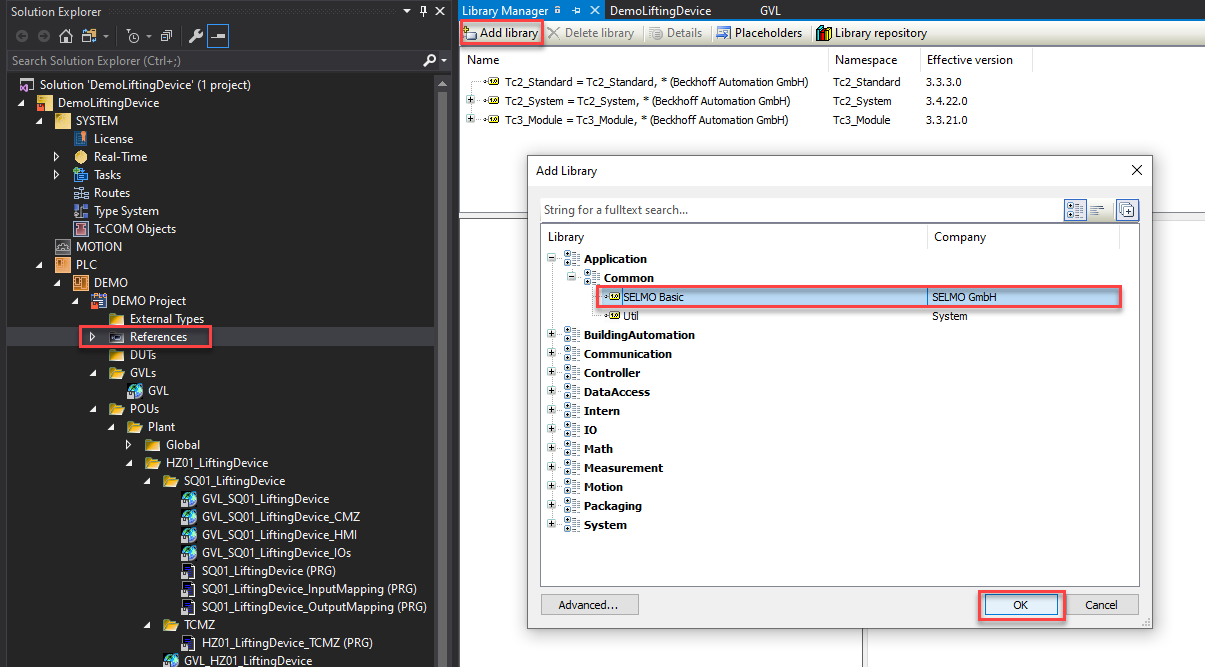
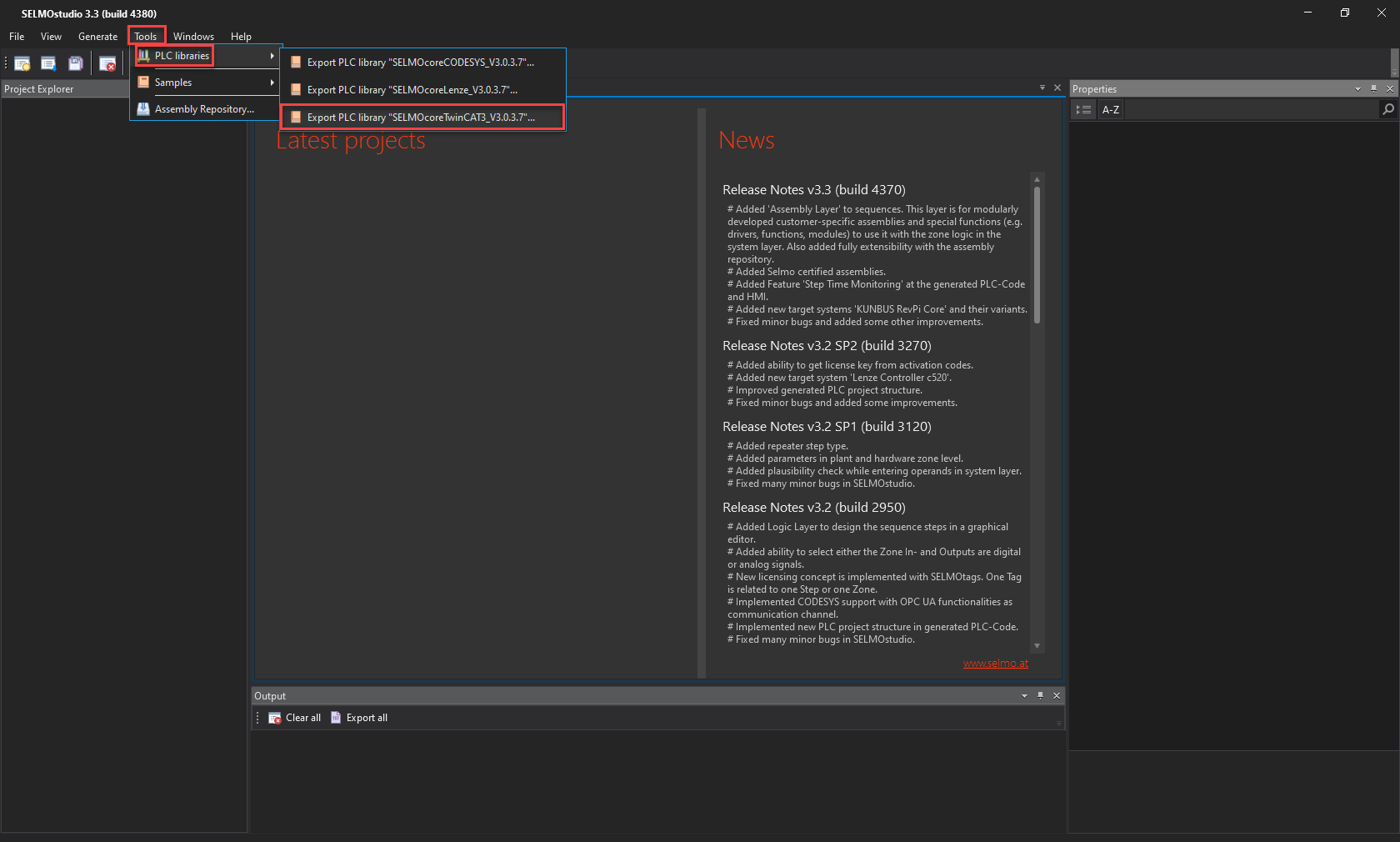
Die Bibliothek wird in Ihr Projekt geladen. (Verwenden Sie immer die neueste Version.)

Die neueste Version finden Sie in unserem Selmo studio:
Speichern Sie alle Änderungen:
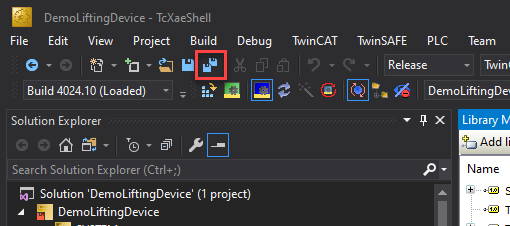
Laden Sie das Projekt und starten Sie die SPS:
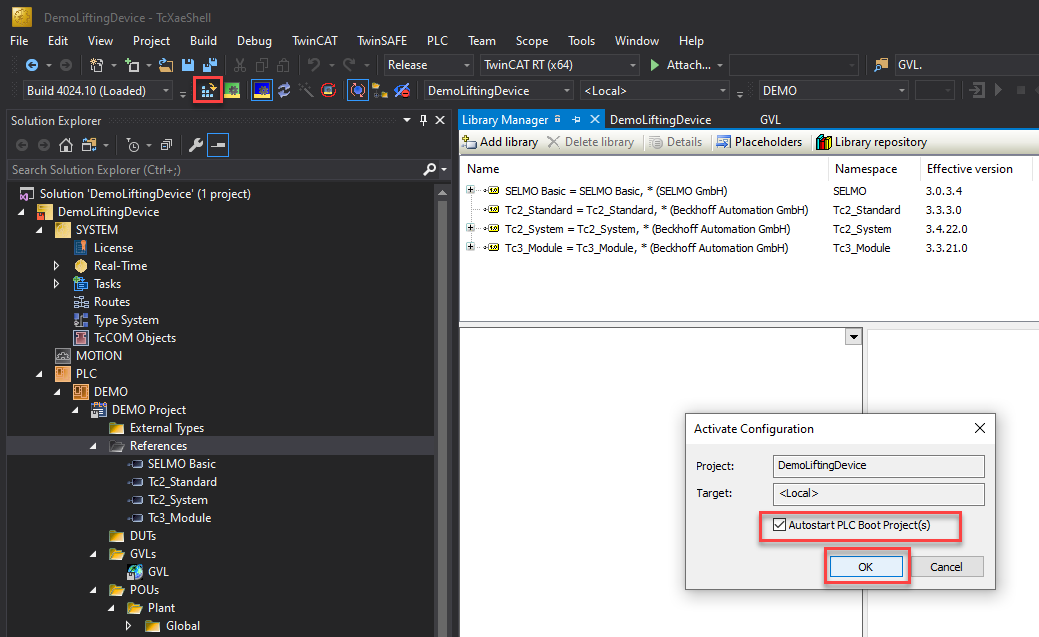
Das Projekt ist jetzt geladen und die SPS springt in den RUN Modus.
![]()
![]()
Man kann sich hier einloggen:

Die Anwendung wird auf dem Controller ausgeführt.
![]()