Selmo Vorteile
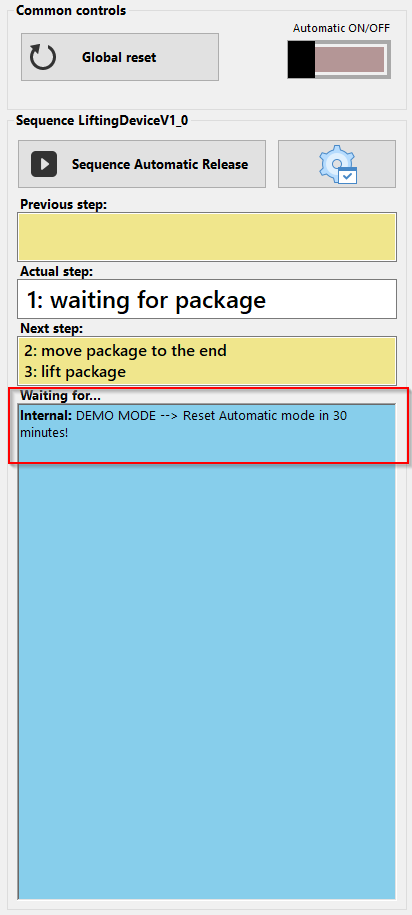
Der Hauptvorteil von Selmo als Programmstruktur besteht in der Verwendung der Überwachung bzw. Diagnose zur Steuerung der Maschine. Daher sind die Überwachung und die Diagnose immer aktiv, wenn die Schrittkette auf ein Signal (Bit) wartet.
Im Gegensatz zum herkömmlichen Aufbau einer State Machine (Schrittkette) werden nicht die Bits, welche zur Weiterschaltung definiert sind, abgefragt, sondern es wird dann weitergeschaltet, wenn nichts dagegenspricht (BLAUES Diagnosefenster). Hierbei handelt es sich um die Bedingungen, die pro Maschinenschritt erfüllt sein müssen.
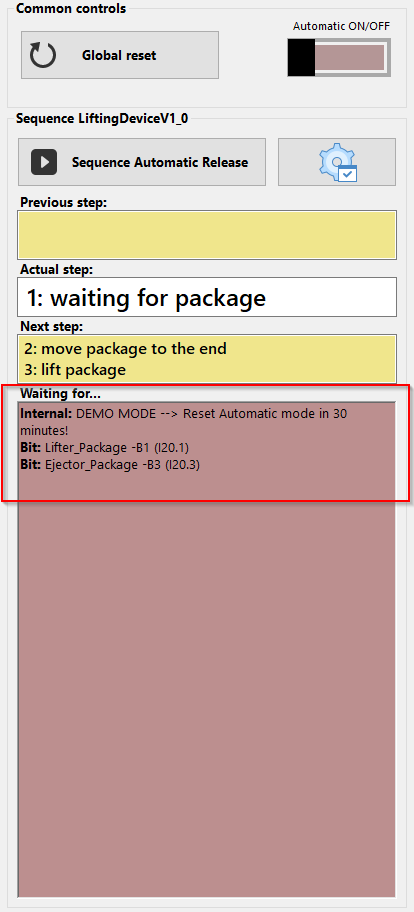
Selmo gibt zudem je Bit eine Meldung aus, die den Bediener darüber informiert, was zur Weiterschaltung fehlt. Wenn also das reale System (Automat, Maschine oder Anlage) vom Programm abweicht, dann wird je Bit eine Meldung angezeigt, welche dem Bediener genau diese Abweichung anzeigt. Dazu werden die gleichen Bits wie zur Überwachung und zur Diagnose verwendet. Der Unterschied besteht darin, dass in der Standardanwendung das Diagnoseanzeigefenster ROT hinterlegt wird.
Durch die genaue Zuordnung der einzelnen Bits in der Programmstruktur kann von der Anzeige auf jede Baugruppe bzw. auf jedes einzelne Signal rückgeschlossen werden. Daraus ergibt sich eine schnelle Fehleranalyse, wodurch Ausfallzeiten verkürzt werden. Die Fehlerbehebung erfordert, wenn der Prozess korrekt modelliert wurde, keine Programmierer, da die Abweichungen eindeutig in der Hardware liegen.
Selmo Diagnosefunktionen
•Das SPS-Programm enthält eine Möglichkeit der Überwachung, um zu gewährleisten, dass die Maschine in jedem Maschinenschritt die richtige Position beibehält. Für den Fall, dass es zu Abweichungen kommen sollte, wird über die Diagnose ein Fehler gemeldet, woraufhin der automatische Betrieb ausgesetzt und die Störungsmeldung angezeigt werden.
•In der SPS-Software ist eine Funktion zur Überwachung von „Maschinenunsicherheiten“ enthalten. Maschinen-unsichere Zustände wie Leistungsschalter, Sicherungen usw. werden im SPS-Programm ständig überwacht. Sie stoppen im Fall eines Fehlers unverzüglich den automatischen Betrieb, zeigen den Fehler an und sperren den manuellen Betrieb.
•Die gleichen Meldungen werden verwendet, um einem Bediener zusätzliche Informationen bereitzustellen, während die Maschine manuell gesteuert wird.
•Während einer manuellen Bewegung wird der Bediener darüber informiert, welche Signale das SPS-Programm erwartet.
•Wenn eine manuelle Bewegung nicht erlaubt ist, wird dem Bediener die Vorgehensweise zur Zulassung der angeforderten Bewegung mitgeteilt.
•Eine weitere Möglichkeit zur Überwachung „unkritischer“ Alarmmeldungen ist vorhanden. Diese werden als Warnungen angezeigt.
Unkritische Alarmmeldungen wie die Vorwarnungen „Standzeit“, „Temperatur“ usw. werden kontinuierlich im SPS-Programm überwacht und im aktiven Zustand über die Diagnose gemeldet – der manuelle bzw. automatische Betrieb der Maschine bleibt davon unberührt.
Grundkonzept Schrittketten-Steuerung
Für die Einführung der Selmo-Programmiertechnik, die die auf der vorherigen Seite angeführten Möglichkeiten bietet, ist zunächst die Beschreibung des Grundkonzepts der Schrittketten-Steuerung wichtig.
In jedem schrittfolgengesteuerten System gibt es für jeden einzelnen Schritt einer Schrittfolge Aktionen, die eingeleitet werden müssen, und entsprechende Bedingungen, die erfüllt werden oder erfüllt sein müssen, um ein Inkrementieren zum nächsten Schritt zu ermöglichen.
Beispiel:
Schritt 1 Maßnahme = Hubtisch-Magnetventil mit Strom versorgen (-Y1)
Zu erfüllende Bedingung für Schritt 1 = Sensor Tisch angehoben = EIN (-B2)
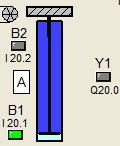
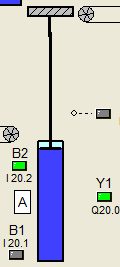
In obigem Beispiel wird der Hubtisch-Zylinder angesteuert. Nur für den Fall, dass der Hubtisch angehoben wird, was durch den Sensor angezeigt wird, wird die Schrittfolge zu Schritt 2 erhöht.
In Schritt 2 werden weitere Aktionen und Bedingungen angezeigt.
Selmo unterscheidet sich nicht von den oben genannten, verwendet jedoch dieses grundlegende Konzept und verbessert es, um damit eine genaue Echtzeitdiagnose sowohl im automatischen als auch im manuellen Modus zu ermöglichen, die eine einfache, erneute Sequenzierung der Maschine erlaubt.
Darüber hinaus besteht die Möglichkeit, die unsicheren Bedingungen der Maschine, z. B. den Ausfall von Sicherungen, ständig zu überwachen, um die Sicherheit der Maschine zu gewährleisten.
Für eine weitere Beschreibung der Grundprinzipien von Selmo wird auf die Selmo-Terminologie verwiesen werden, die in der "Begriffsdefinition" der Spezifikation näher erläutert wird.
Gesamtstruktur, BitControl
Selmo beruht auf einer Gesamtstruktur für die Realisierung von Steuerungsprogramn.
Der Kern von Selmo ist das für den Ablauf logische Modell, das in eigens entwickelten Modellierungstools zur Verfügung gestellt wird (www.Selmo.at). Dieses bietet die Möglichkeit zur einfachen Erfassung des logischen Ablaufs und der Baugruppen, welche in bitorientierten Zonen aufgetragen werden.
Der kleinste Bestandteil jeder Maschine ist das einzelne „Bit“. Es kann den Zustand 0 oder 1 annehmen. Da Selmo jedes Bit bei jedem Schritt auf den korrekten Wert hin überwacht, ist eine 100%ige Funktionssicherheit der Software erfüllt. Die Modellierung wird in den nächsten Abschnitten genauer beschrieben.
Ausgehend von dieser Kernfunktion stützt sich Selmo auf exakte Schrittschaltwerke, die intern die Ausgänge für die Funktionen schalten. Vereinfacht ausgedrückt heißt das: Wenn die Logik eine Bewegung von A nach B schaltet, dann kann die ausführende Einheit ein Zylinder, ein Antrieb oder Sonstiges sein. Logisch wird die Bewegung angestoßen und der notwendige Treiber, der von Selmo generisch oder speziell zur Verfügung gestellt wird oder vom Programmierer selbst entwickelt wurde, wird mit dem Schaltwerk verbunden.
Die vorhandenen Treiber können im Modell für die Baugruppe ausgewählt bzw. verwaltet werden. Steht ein bereits vorhandener Treiber zur Verfügung, wird dieser ausgewählt und ohne manuelle Programmierung direkt in das spätere Programm umgewandelt. Ist eine Baugruppe ohne Treiber bzw. wird einer dafür benötigt, wird dieser als Hülle angelegt und findet sich auf einer offenen Programmliste wieder. So kann die Wiederverwendbarkeit gefördert werden. Die Treiber für Selmo haben eine klare Struktur und werden in weiteren Kapiteln genauer beschrieben. Jeder kann die Treiber entwickeln und wiederverwenden. Ziel von Selmo ist es, Treiber für Komponenten nur einmal zu entwickeln und diese anschließend den Selmo-Nutzern zur Verfügung zu stellen.
Sequence
Mit der Sequence (Schrittkette) wird ein Teil des Automaten bzw. der gesamte Automat logisch beschrieben. Jedes Bit ist in jedem Schritt definiert, wodurch ein automatischer Ablauf der Schritte ermöglicht wird. Für den Handbetrieb werden Verriegelungen (Interlocks) im manuellen Zweig der Bewegungssteuerungen benötigt. Diese Verriegelungen verhindern logisch einen Maschinenschaden. Wenn eine Absteckung frei sein muss, damit eine Bewegung ausgeführt werden kann, muss diese Bewegung solange verhindert werden, bis sich die Ansteckung in der richtigen Position befindet.
Damit der Bediener über die Verriegelung informiert wird, zeigt Selmo diese Bedingung an. Dies macht eine Fehlbedienung so gut wie unmöglich. Der Bediener wird voll unterstützt. Mit der Modellierung der Hand-Bedienung ist die Selmo Sequence fertig und kann automatisch in ein SPS-Programm nach PLCOpen umgesetzt werden. Weitere Standards werden folgen.
SeqCross, Handshake
Wenn eine Maschine aus mehreren Schrittketten besteht, bietet Selmo eine SeqCross-Funktion. Damit werden parallele Abläufe oder synchrone Abläufe realisierbar.
Wenn zwei Schrittketten voneinander abhängen, werden diese Schrittketten über Freigabe-Bits synchronisiert. Mit der Auswahl von Handshake-Zonen (zwei Zonen mit Bit-Überwachung auf 0 und 1) im Modell wird eine verbundene Schrittkette benötigt. Dazu wird ebenfalls eine Handshake-Zone angelegt.
Ein Beispiel:
•Schrittkette 1 wartet auf die Freigabe von Schrittkette 2 in Schritt 4.
•Wenn Schrittkette 2 im Schritt für die Freigabe an Schrittkette 1 ist, wird das Bit gesetzt.
•Schrittkette 1 kann nun weiterschalten.
•Beide Schrittketten arbeiten unabhängig weiter, bis die Schrittkette 2 auf die Freigabe von Schrittkette 1 wartet, dass diese die Freigabe nicht mehr benötigt.
•Schrittkette 1 setzt im definierten Schritt das Bit zurück, damit die Schrittkette 2 weiterschaltet.
Mit dieser Möglichkeit können Anlagen mit mehreren Schrittketten oder Automaten mit Parallelabläufen synchronisiert werden.