In the control of discrete systems, which will be dealt with here, a control algorithm is sought for a given discrete system with input ![]() and output
and output ![]() as well as a control target. The algorithm should select the input sequence
as well as a control target. The algorithm should select the input sequence ![]() depending on the output sequence
depending on the output sequence![]() in such a way that the control goal can be achieved.
in such a way that the control goal can be achieved.
The following objectives can be specified for the control system:
Specified end state: The control path is to be transferred to the end state ![]() or the output sequence is to end with the value
or the output sequence is to end with the value ![]() .
.
Specified sequence: The control path is to run through a predefined sequence ![]() of states.
of states.
Forbidden states: The control path may not assume the states ![]() of the specified set.
of the specified set.
Forbidden state transitions: The control path must not execute the state transitions (events) of a given set ![]() .
.
These control goals, put into a formalism, are called the formal specification of control. In the illustration, the controlling system is the control device and the actuators, sensors and the process to be controlled are the control path.
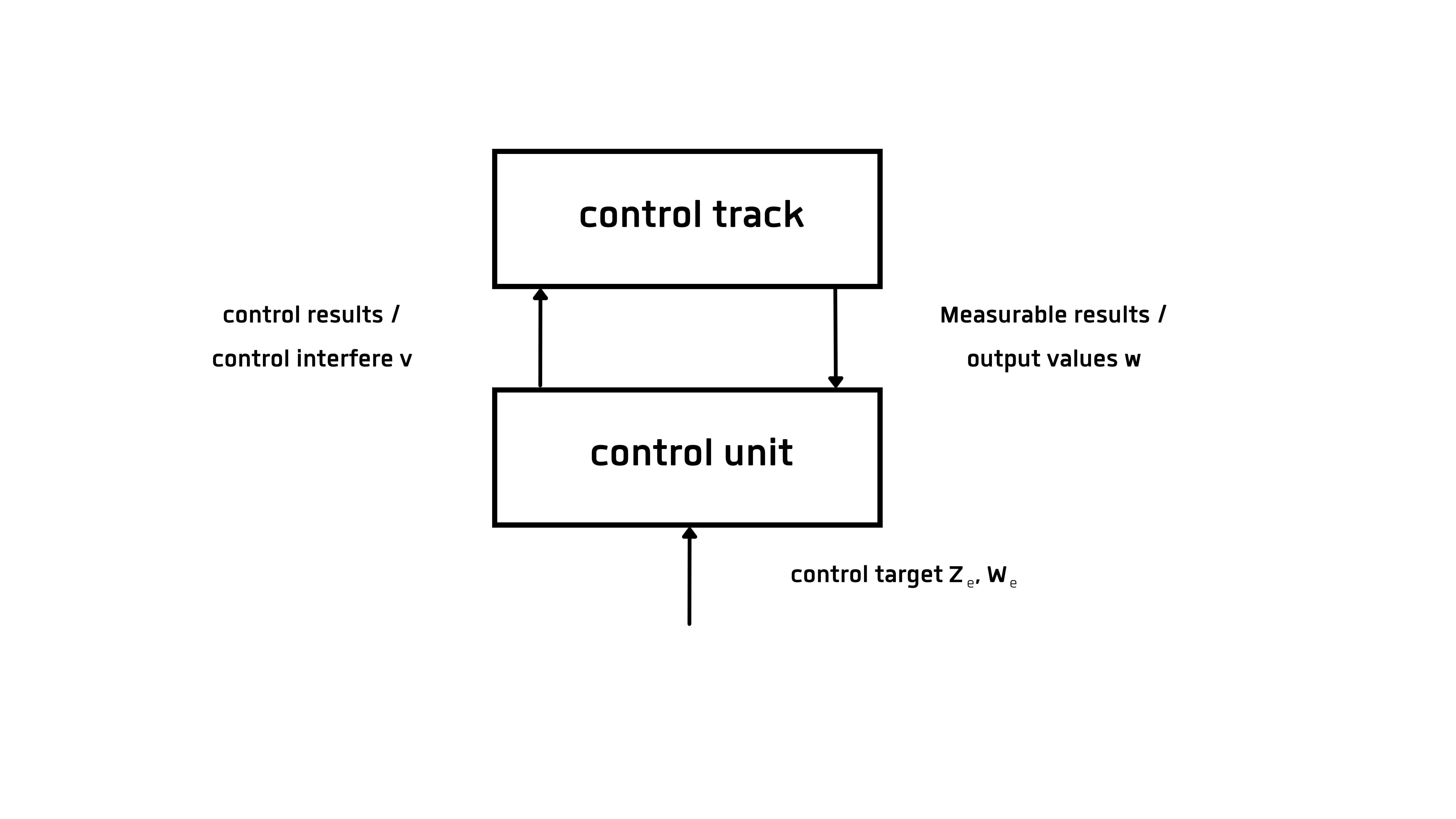
The control device determines the input ![]() of the control path depending on the output
of the control path depending on the output![]() , so that the operation of the control algorithm
, so that the operation of the control algorithm ![]() can be described by a function.
can be described by a function.
![]()
If no dynamic element is included, the following relationship applies for each point ![]() in time
in time
![]()
This type of control is called logic control because the current input to the control path depends solely on the last output of the control path.
If the control contains dynamic elements, then the following applies:
![]()
The sequence of the last ![]() -output stored in the control algorithm can be interpreted as the state
-output stored in the control algorithm can be interpreted as the state![]() of the control system, then the following applies
of the control system, then the following applies
![]()
and we speak of a sequence control. Cf. (Lunze, 2003, p. 409)