According to DIN 19226-4, the term "control" is to be based on a general structure. Control is thus the generic term for the totality of controlling and controlled system, similar to regulation, which includes both controller and controlled system. Figure 1 shows the control circuit.
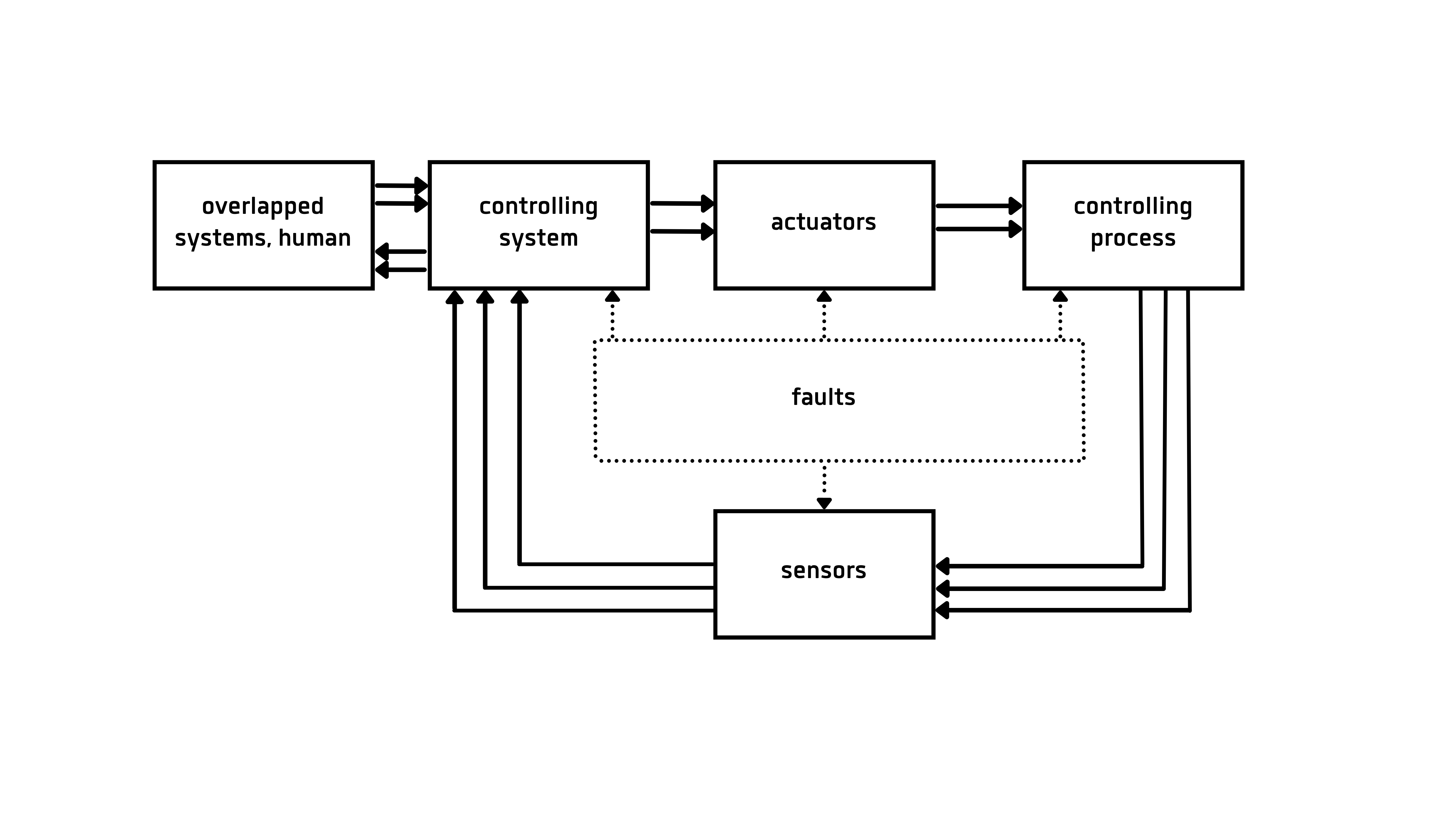
Im steuernden Teil des Systems verarbeitet der Steuerungsalgorithmus die Informationen aus verschiedenen Quellen. Informationen von überlagerten Komponenten und solche, die über die Bedienoberfläche kommen, werden in die Steuerung miteinbezogen. Der Prozesszustand wird über die Sensorik erfasst, ebenso werden die Zustände der Aktoren zurückgeführt. Für den Steuerungsalgorithmus werden diese Informationen als Eingangsinformationen betrachtet und daraus die Ausgangsinformationen erzeugt. Die Ausgangsinformationen steuern die Aktoren, um auf den zu steuernden Prozess einzuwirken. Neben den Steuerbefehlen an die Aktorik werden die Ausgangsinformationen an die überlagerten Systeme, und insbesondere die Information an den Bediener, immer wichtiger. Charakteristisch für eine solche Steuerung sind:
•Eingangs- und Ausgangsinformationen des steuernden Systems sind fast ausschließlich als binäre Größen zu betrachten. Analoge Eingangsgrößen werden auf binäre Größen abgebildet und so im Steuerungsalgorithmus verarbeitet.
•Rückführungen vom Prozess und Aktoren lassen einen Steuerkreis entstehen.
•Von Störungen in Aktoren, Prozessen und Sensorik muss immer ausgegangen werden, dadurch ist die Störungsbearbeitung ein fester Teil im Steuerungsalgorithmus. Nur vorhersehbare Störungen können sicher beherrscht werden und in den meisten Fällen kommt die Komplexität der Steuerungsalgorithmen erst durch die Störungsbearbeitung zustande. Ein Großteil der Eingangssignale dient primär oder ausschließlich der Störungsbearbeitung.
•Die Abarbeitung einer großen Anzahl von Ein- und Ausgangssignalen im Steuerungsalgorithmus ist typisch. Schon bei einfachen industriellen Steuerungslösungen sind weniger als 10 Signale selten, oft liegen diese bei mehreren hundert und darüber. Diese Komplexität gilt es zu beherrschen und diese fehlerfrei in einen funktionierenden Steuerungsalgorithmus zu bringen.
Der Definition des Steuerungsbegriffes ist unbedingt der Blickwinkel des Menschen als Bediener bzw. Beobachter hinzuzufügen. Die Ausgangsinformationen aus dem steuernden System müssen dem Menschen verständlich sein und jeder Zustand des Systems muss dem Menschen als Bediener bzw. Beobachter jederzeit erkennbar sein.
Die Eingangsinformationen müssen durch den Steuerungsalgorithmus immer eine klare Information an die überlagerten Systeme und an den Menschen als Bediener bzw. Beobachter ergeben.
Diese Forderungen führen zur Problematik des Steuerungsentwurfes.