With regard to the interface to the HMI, this is not implemented in the modelling with the state graph. The model must be extended so that the interface to the HMI can be taken into account. In order to achieve a comparable function as in the state-zone model, the following extensions must be made:
•Monitoring of the inputs in each state for the defined signal value
•Output of the states
•Output of the transition condition to the HMI
•Output of the error states (like F and P in the SZM)
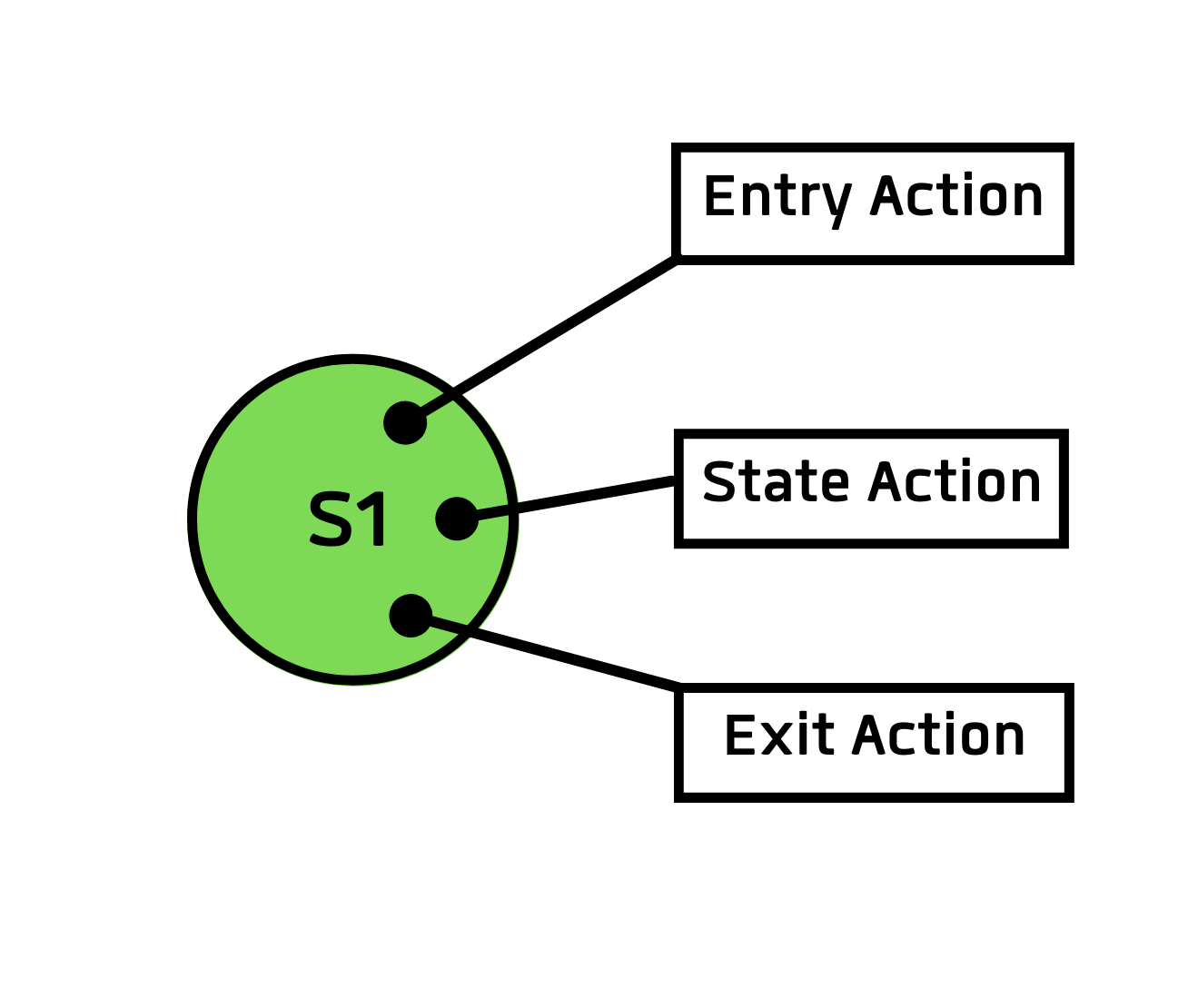
Before the state graph is expanded, a brief explanation of the action function of a state. A state can access three different action functions. The Entry Action, the State Action and the Exit Action. The entry action can process signals when entering the state, just as the exit action can process signals when leaving the state. The state action processes the signals while the state is active.
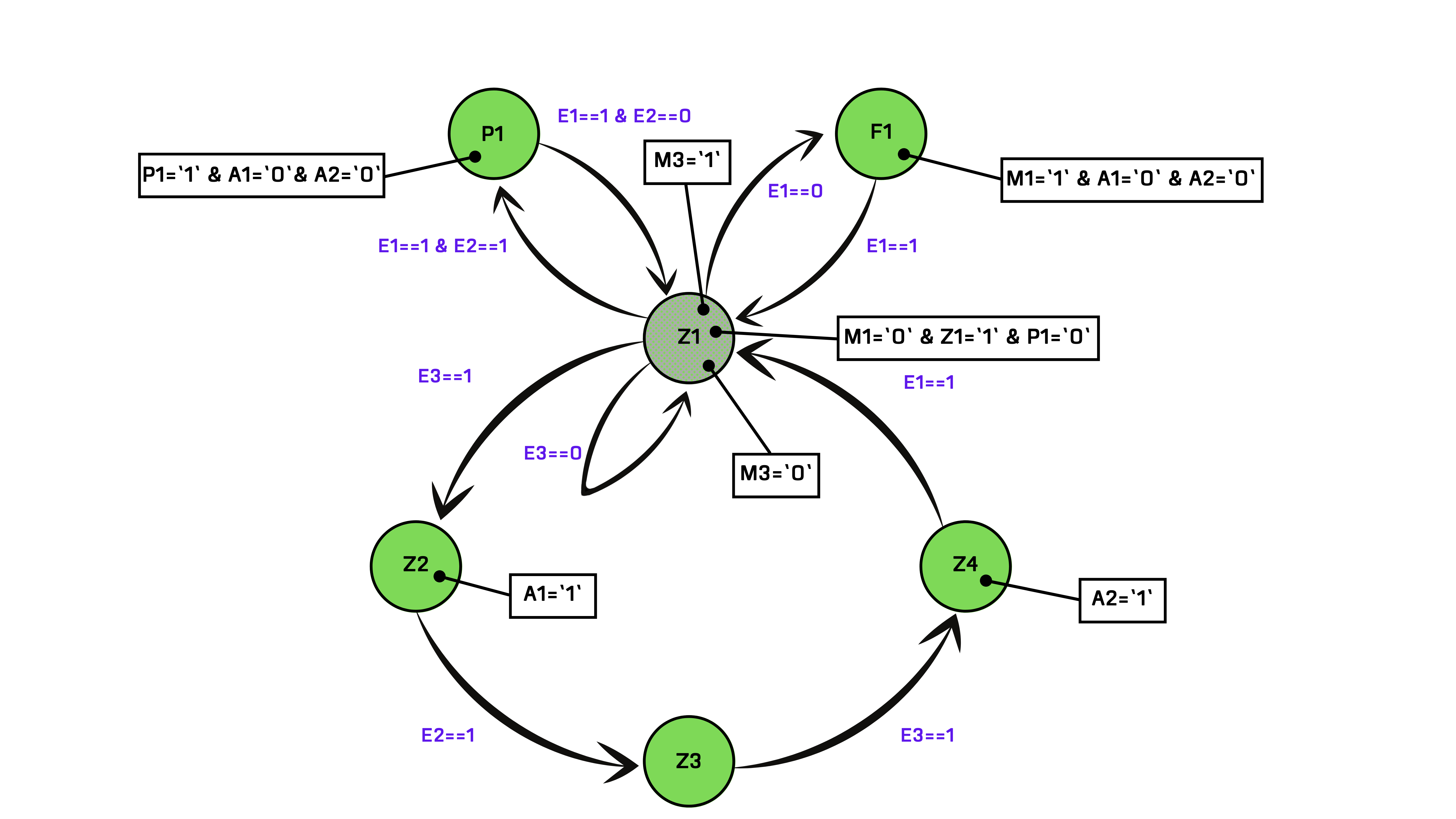
In Figure, the state Z1 has been extended by the functions. Two new transitions lead from the state Z1 to the states P1 and F1. These take over the function of the "Pair Check" and the error " F" as in the state Zones model. In this way, monitoring of the defined signals is achieved and the results are output. A signal Z1 is set in the state action so that the active state can be output. To indicate the transition condition, a transition from Z1 to itself is used. In this way, when the state graph is processed cyclically, a run of the transition "E3==0" is given in every cycle. This means that the matrix bit M3 is set to 0 with the exit action and back to 1 with the entry action. This continues until the transition to Z2 is fulfilled and M3 is set to 0 with the exit action and Z2 is active.
The extension was carried out for one state in order to show how complex and confusing this is if the same function as in the ZZM is to be achieved. Of course, the additional states in the graph make the simulation tables more extensive. I.e. 8 input vectors multiplied by the states.