General
Excerpts from Beckhoff Information System:
The TwinCAT 3 user mode runtime enables the execution of a TwinCAT program without the deep TwinCAT operating system integration that would be necessary to ensure real-time execution. This is difficult or even impossible with newer operating systems without affecting the other components.
Instead, the same program code of the customer project is executed, but without fulfilling the real-time requirements.
Limitations
•The TwinCAT 3 user mode runtime provides an execution environment for the same program code that is also executed in the real-time runtime.
•The TwinCAT 3 user mode runtime has no guaranteed deterministic execution properties. The operating system is able to interrupt the user mode runtime at any time.
•The TwinCAT 3 user mode runtime has no access to EtherCAT. The IO part of the configuration is therefore normally "disabled".
•Components that are based on the real-time Ethernet driver can be executed. The execution times and the jitter can impair the function due to the principle.
•CCAT-based network cards cannot be used.
•The TwinCAT 3 user mode runtime cannot access USB, which means that the license USB stick cannot be used, for example.
•In principle, it also does not make sense to use all TwinCAT functions under a TwinCAT 3 user mode runtime. For example, some TwinCAT functions require a constant real-time tick.
•Where appropriate, TwinCAT 3 functions are extended to work with the TwinCAT 3 user mode runtime. In particular, if something needs to be considered for the TwinCAT 3 user mode runtime with regard to the configuration, this is documented for the respective products.
•The execution sequence between the tasks may differ from the behavior in the real-time runtime due to the principle.
•For this reason, it is also advisable not to make the execution sequence dependent on the task priorities.
Starting the User Mode Runtime
In the current TwinCat version 4024.56, the User Mode Runtime is started via a batch file. This is usually located under "C:\TwinCAT\3.1\Runtimes\UmRT_Default\Start.bat".
Open the CMD and navigate to the directory by entering the command "cd C:\TwinCAT\3.1\Runtimes\UmRT_Default\" in the CMD window.
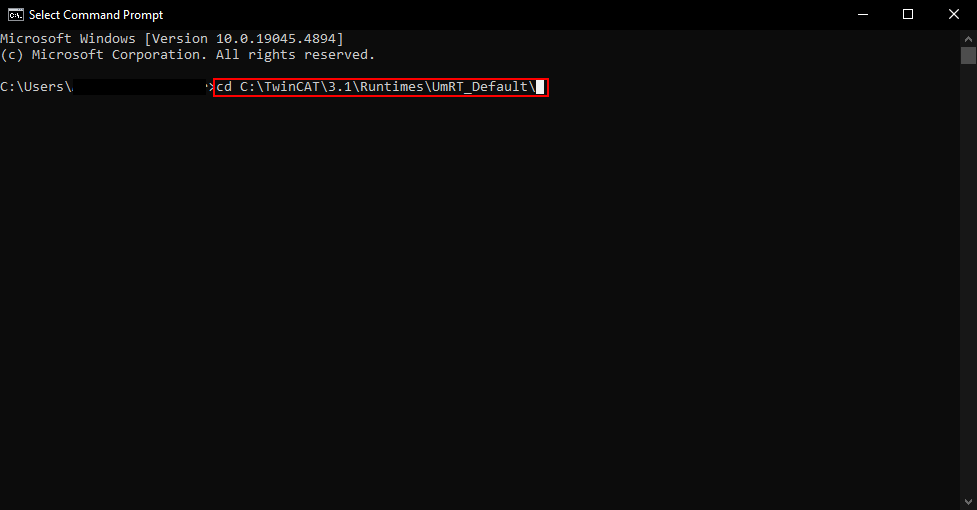
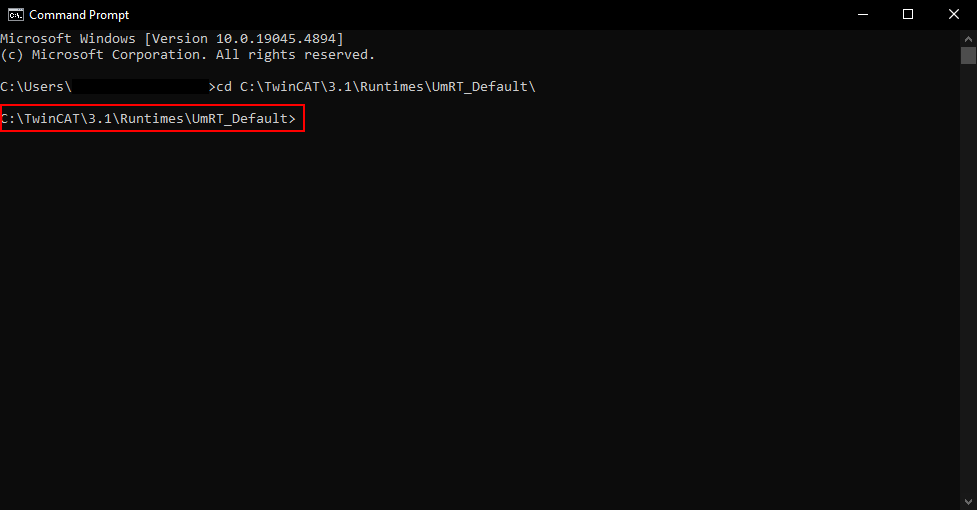
Press the Enter key to open the path:
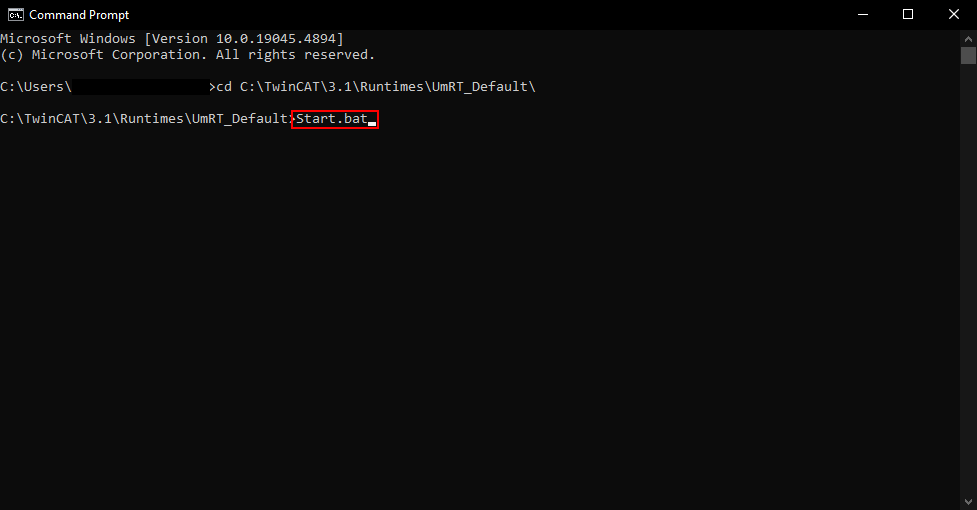
Start batch file by entering "Start.bat" and Enter:
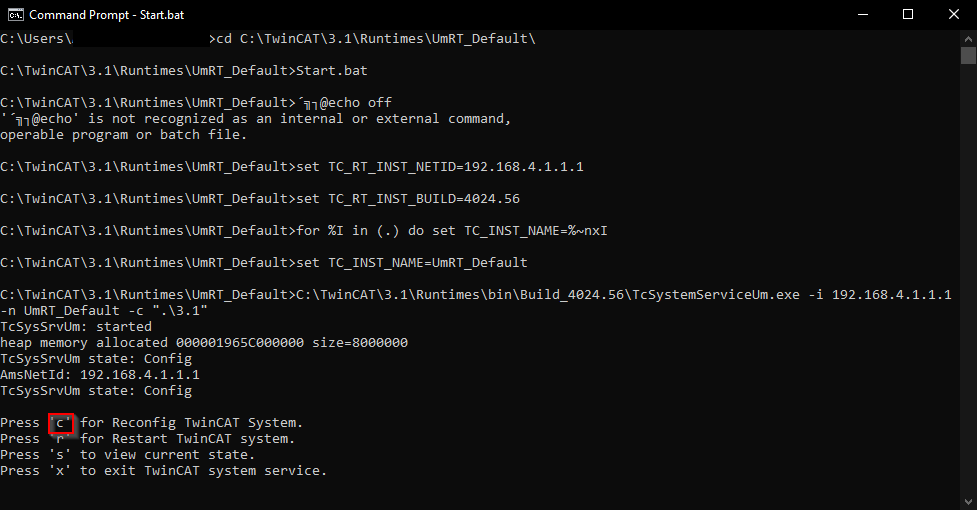
Batch file is opened this must still be started by entering "c":
The option "UmRT_Default" can then be selected in TwinCat XAE under Target systems:
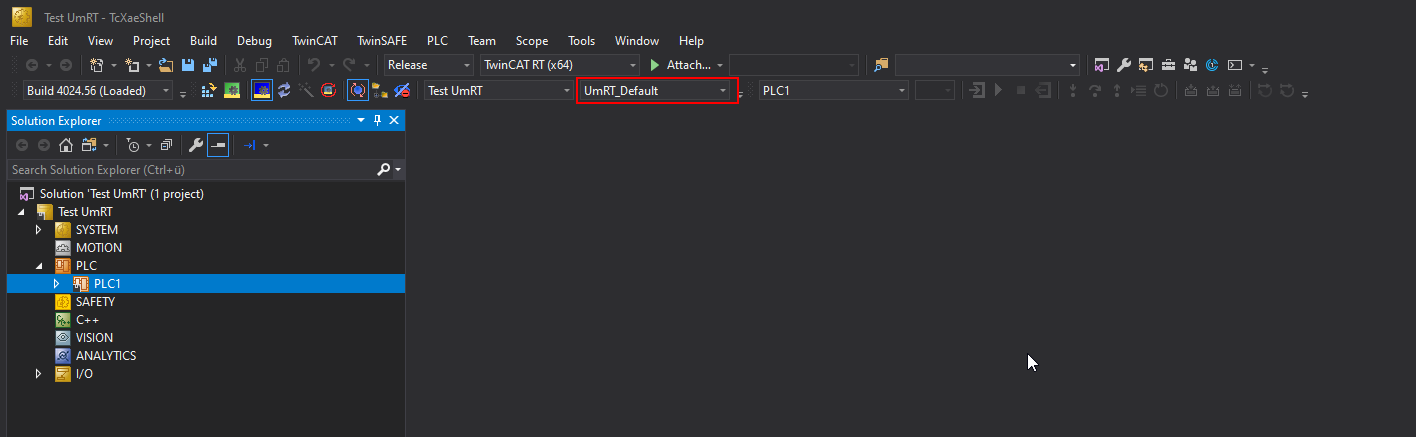
The configuration can then be activated (![]() ) and the runtime started.
) and the runtime started.
The target system now has the NetId: 192.168.4.1.1.1
This NetId must be entered in Selmo Studio under 'Target System' in order to establish a successful connection with the HMI. The check mark for "TwinCAT PLC local" must be removed.
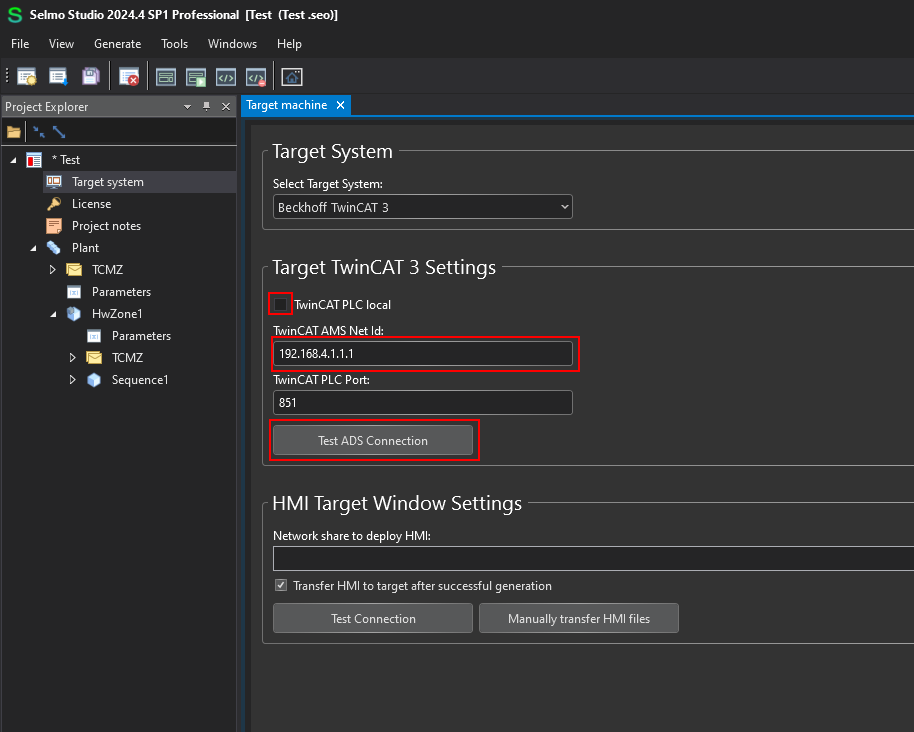
The connection can then be checked by clicking on "Test ADS Connection" (the Runtime must be in the RUN state). If a positive message is displayed, the HMI can be exported and started.
The user mode runtime can now be used with the restrictions already mentioned.