Start TwinCAT XAE:
Open "New TwinCAT project"
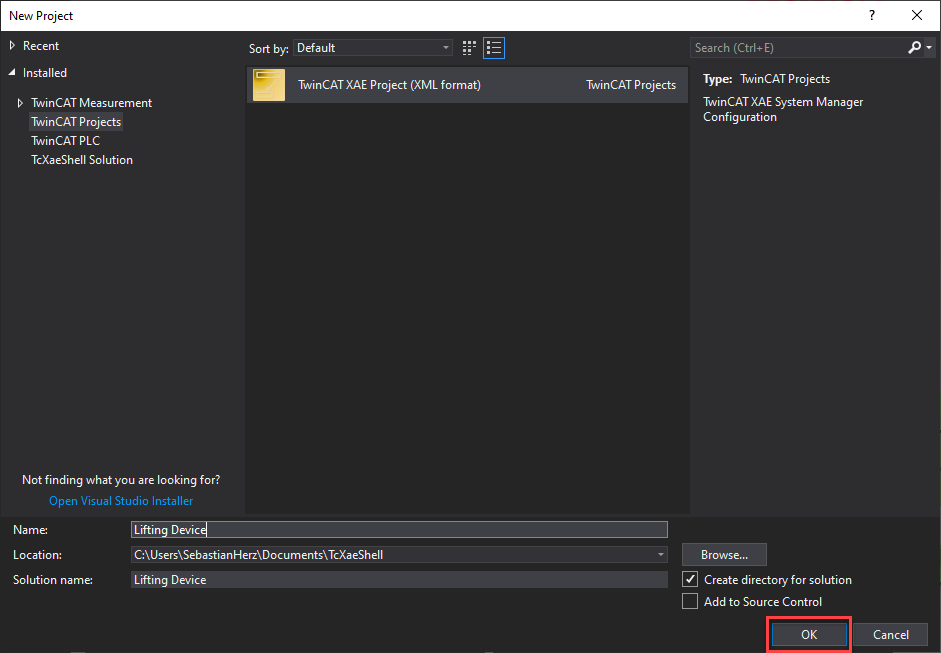
Create a "TwinCAT XAE project":
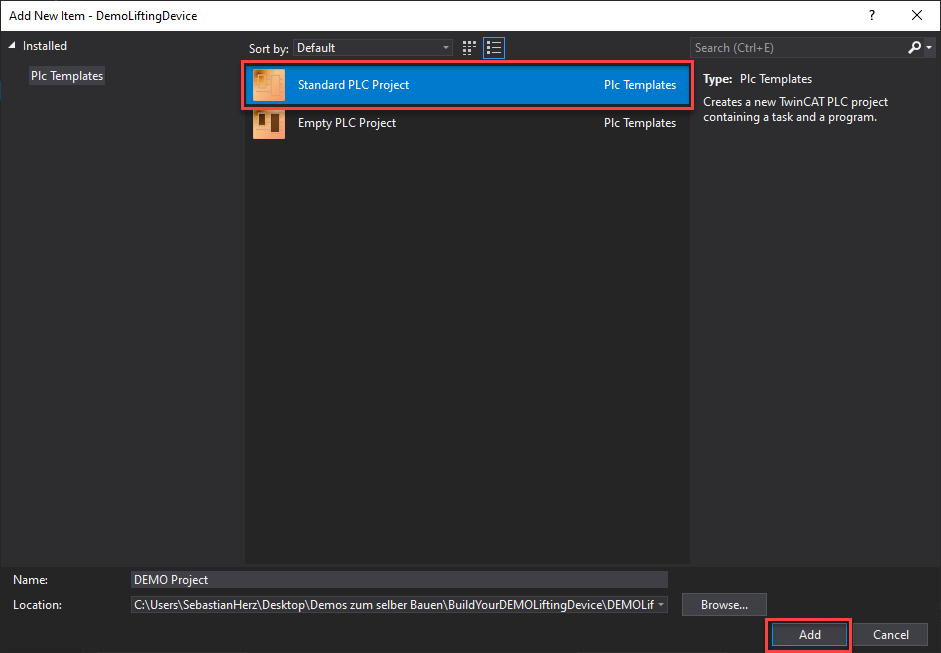
Now you need to create a new PLC project:
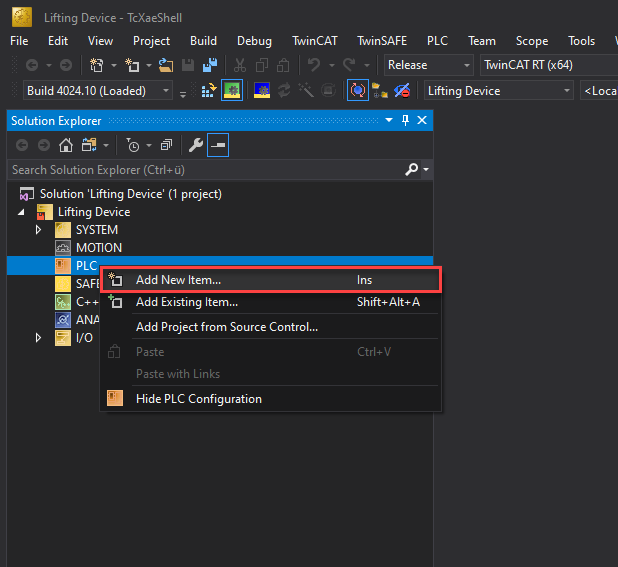
Add a "Standard PLC project":
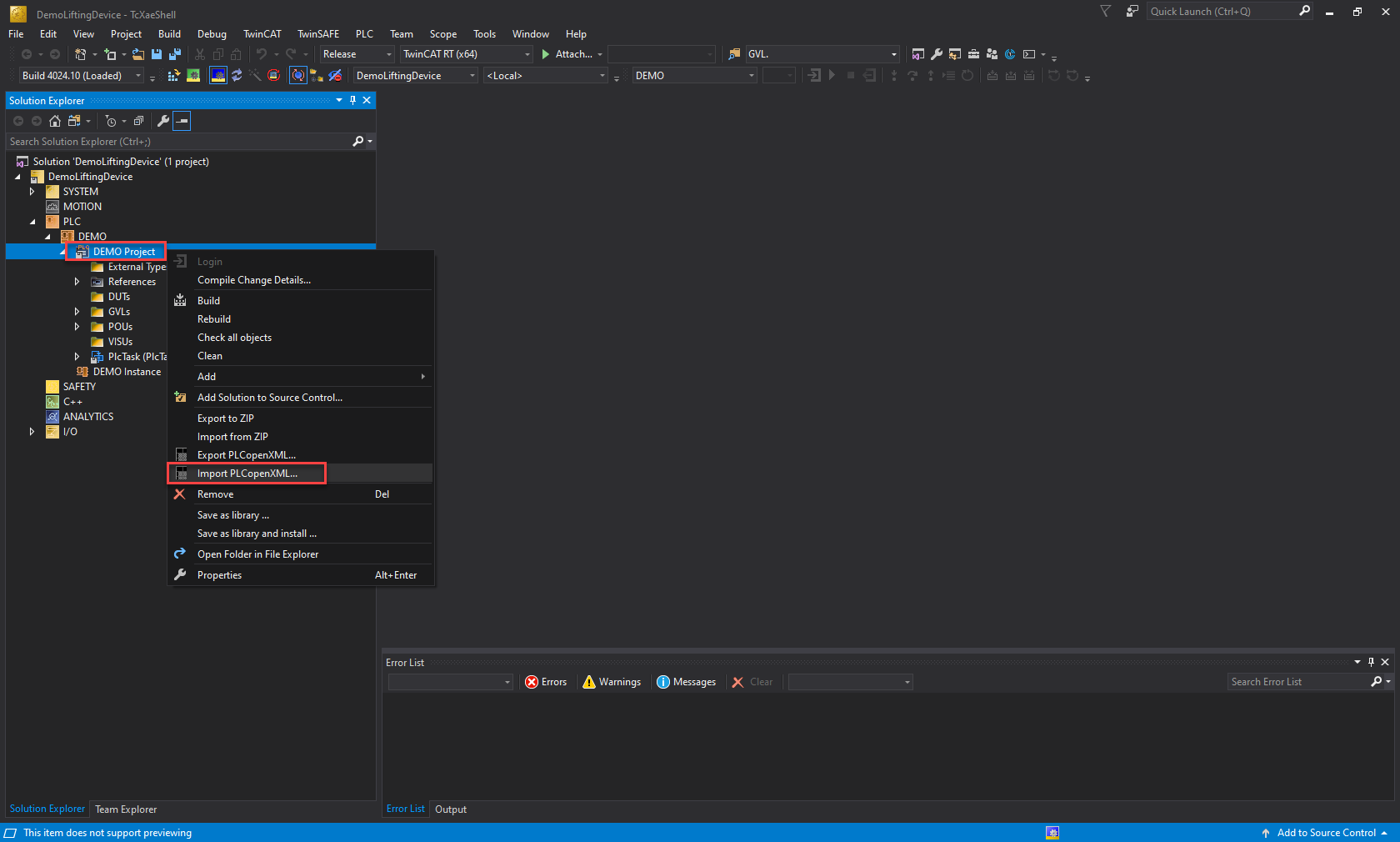
Now you need to import the PLCopenXML file from Selmo studio:
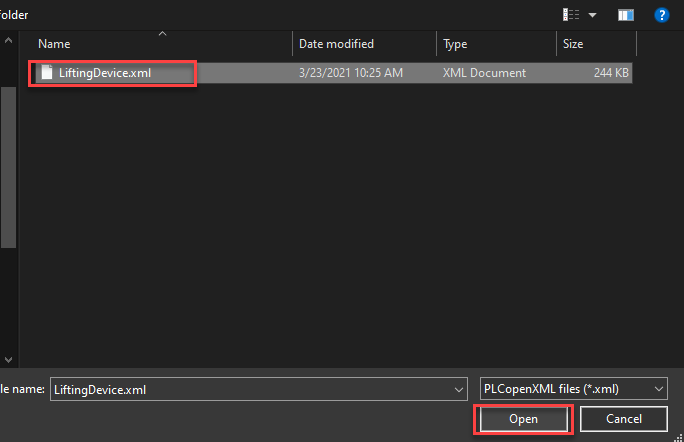
Open the .xml file.
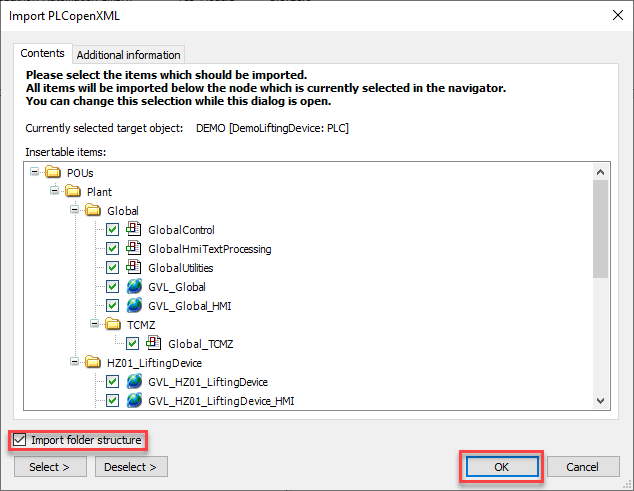
Click on OK.
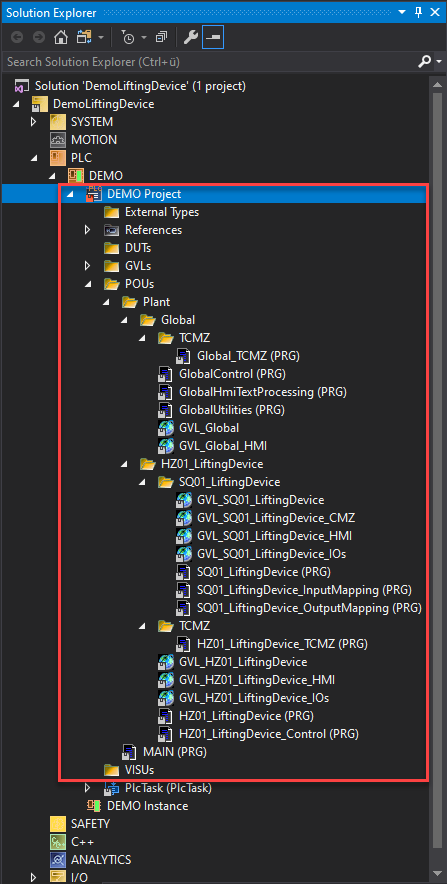
The project has been opened:
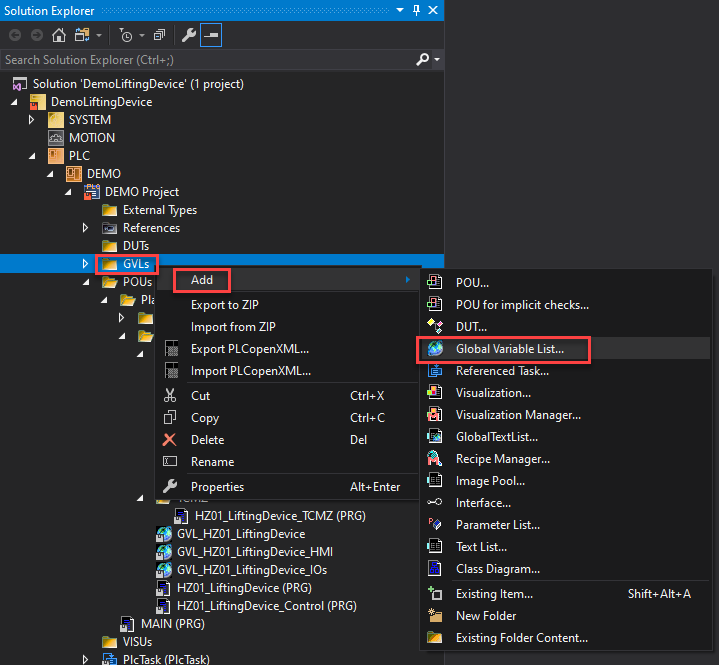
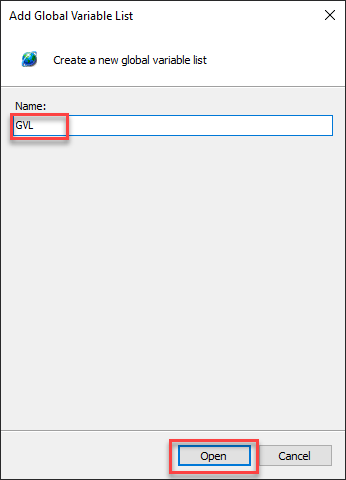
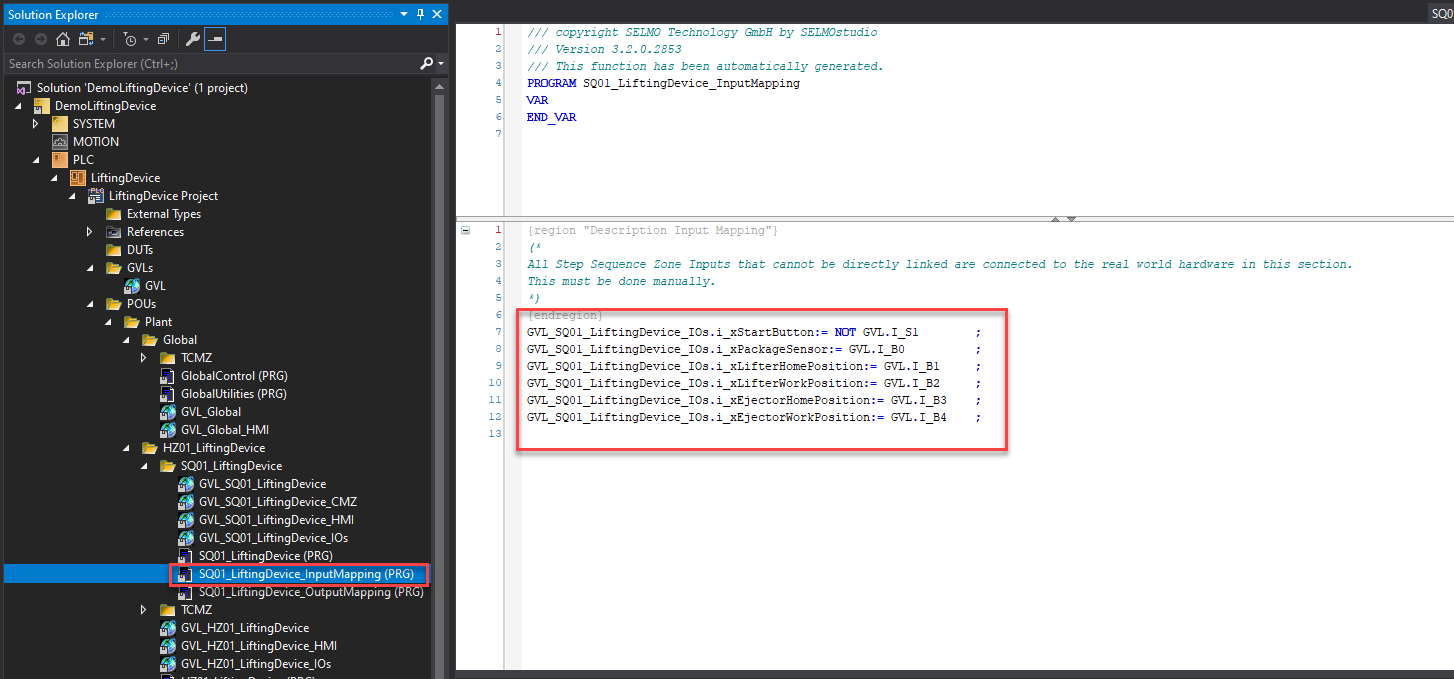
Add a global variable list for your inputs and outputs.
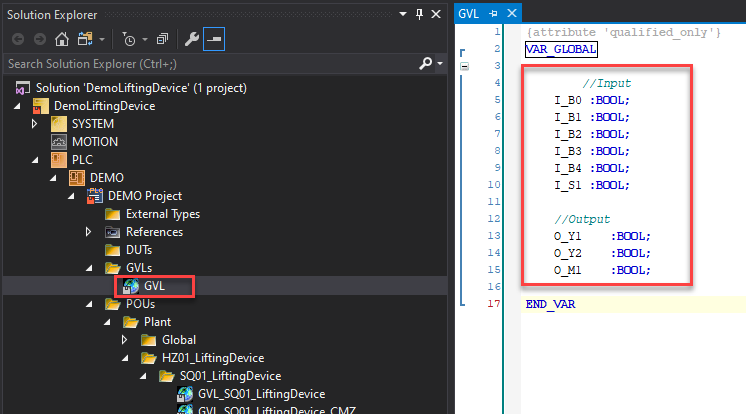
Write your inputs and outputs. (In this case we have used the I / O from our HMI).
Now you need to write the in/ and output mapping
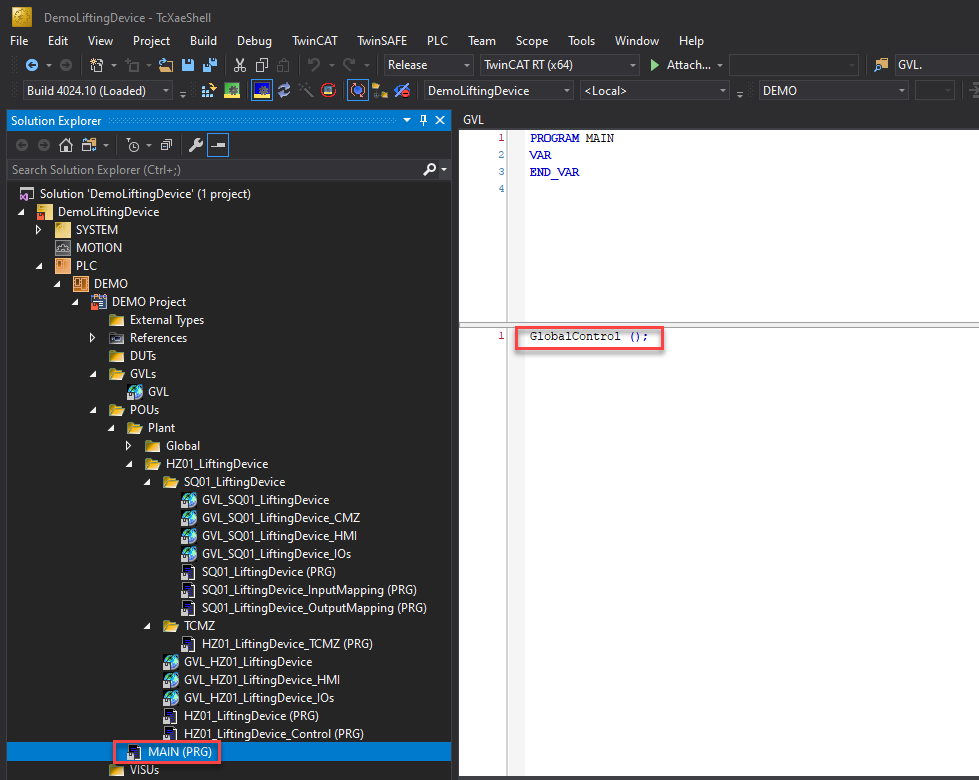
Open "MAIN (PRG)" and write the call "GlobalControl ();"
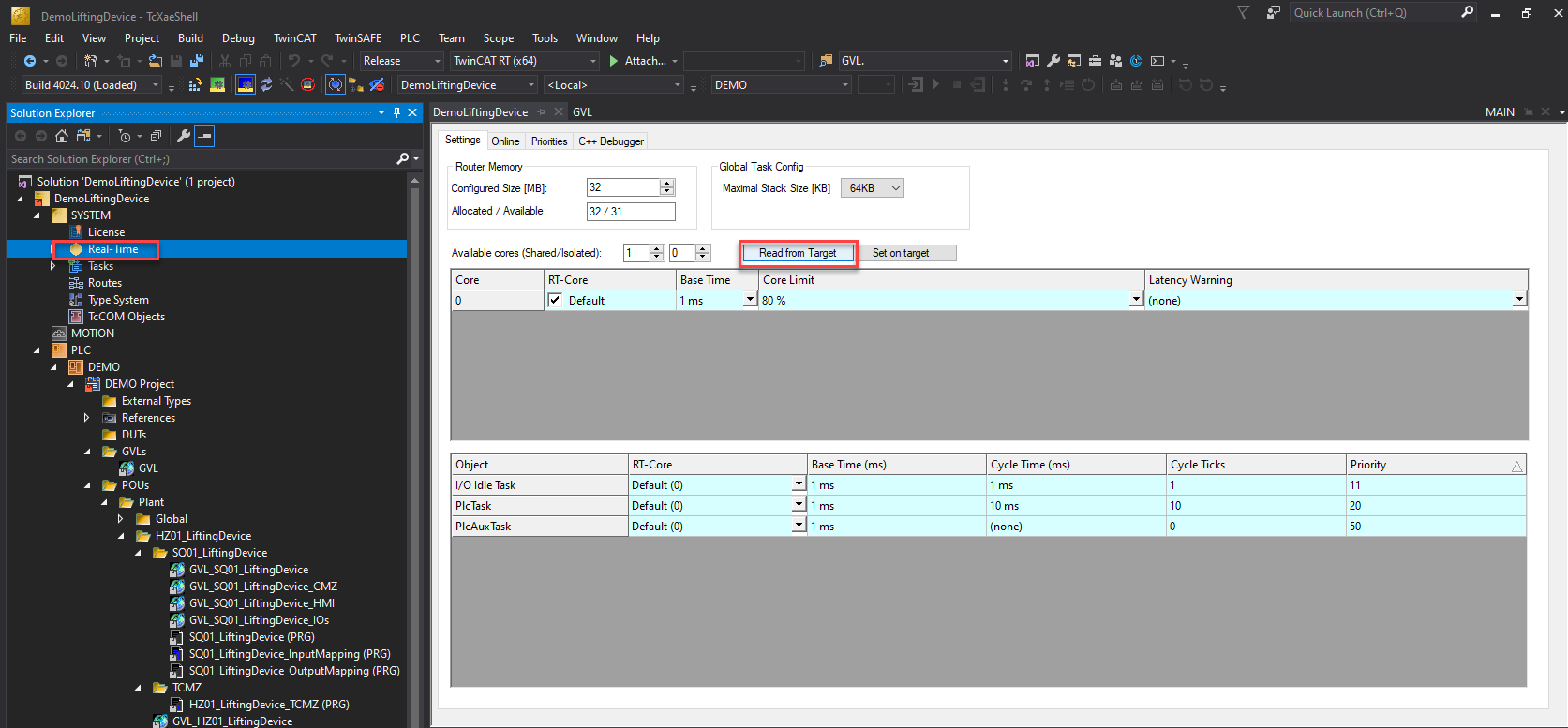
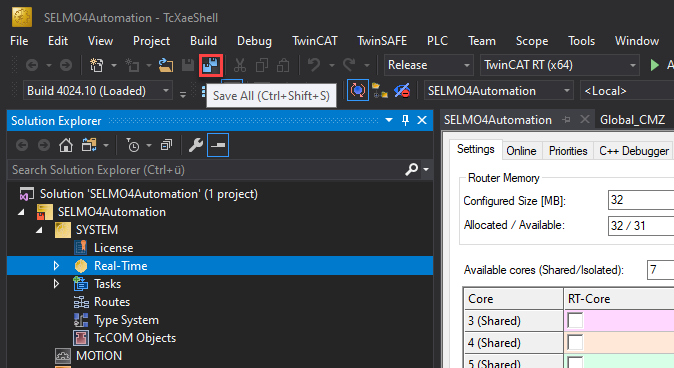
Then go to "System ... Real-Time" and configure your local controller (PLC).
First read the number of available cores on your system. (Press "Read from Target")
There should be at least 2 cores available in order to achieve a stable runtime. In our case the system has 8 cores from 0-7.
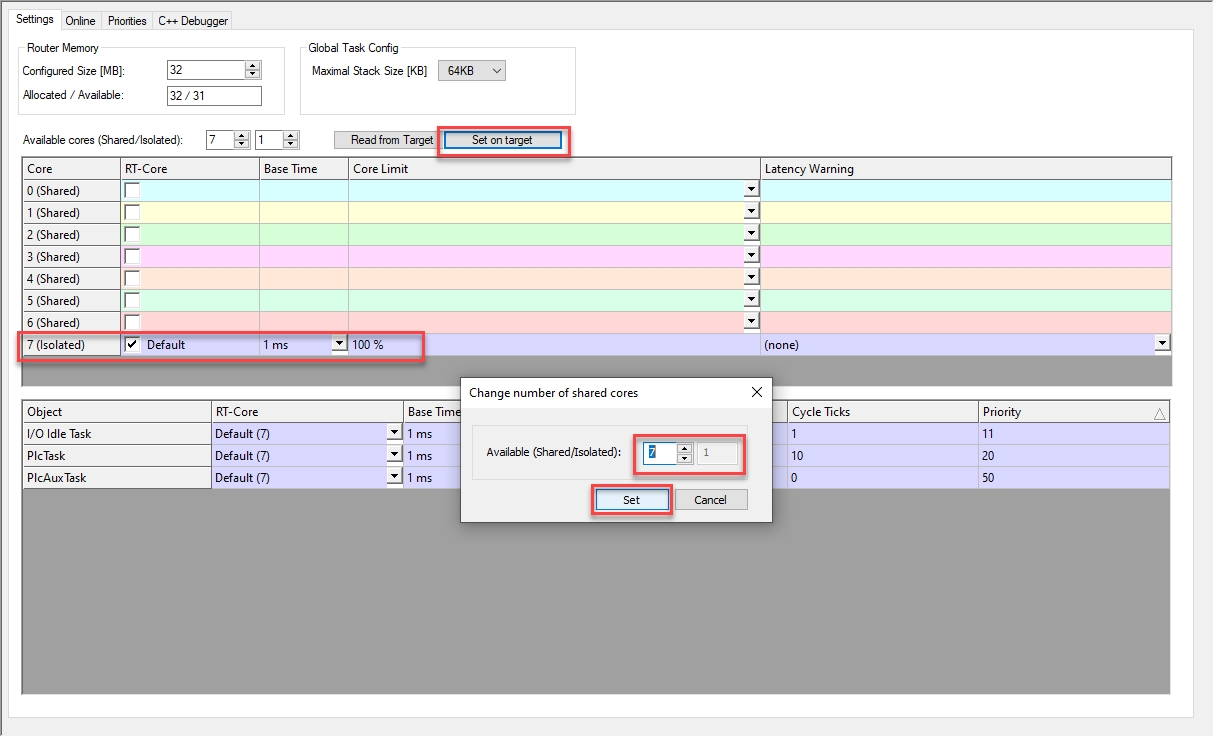
The last core must be isolated: (Click on "Set on target")
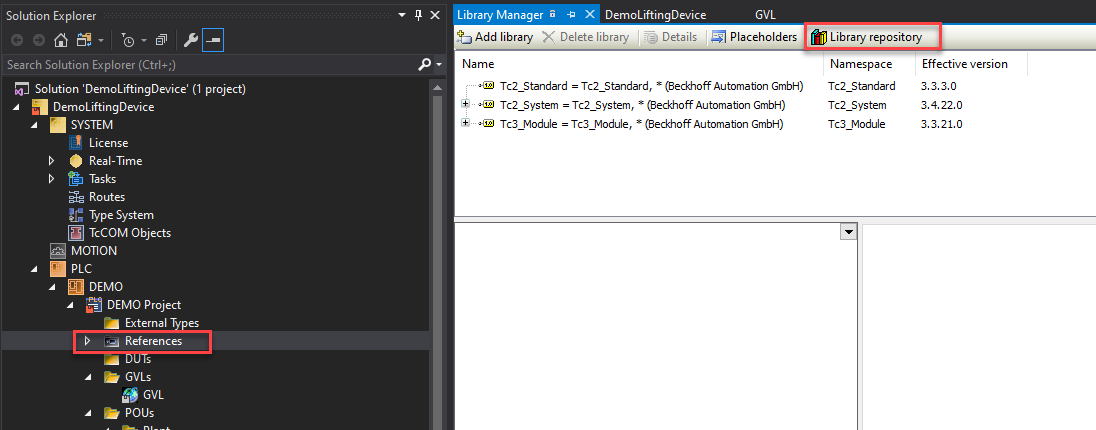
It should also be checked whether the current "Selmo Basic" library is already installed.
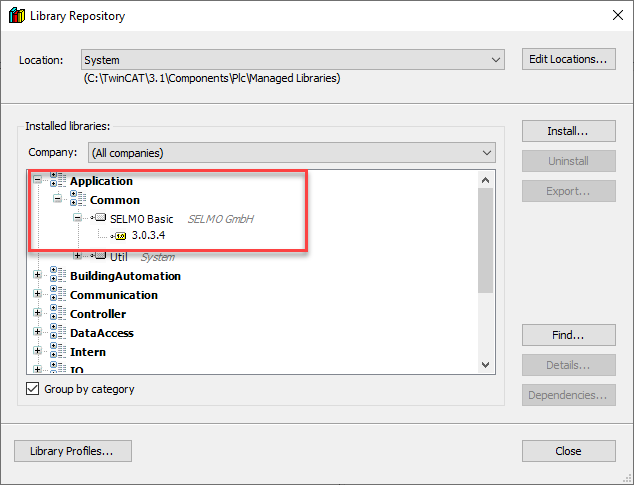
If you have not yet installed the Selmo Basic library, please follow the instructions under "Settings in TwinCAT".
If you have already installed the library, add the Selmo Basic library to your project:

The library will be loaded into your project. (Always use the latest version).

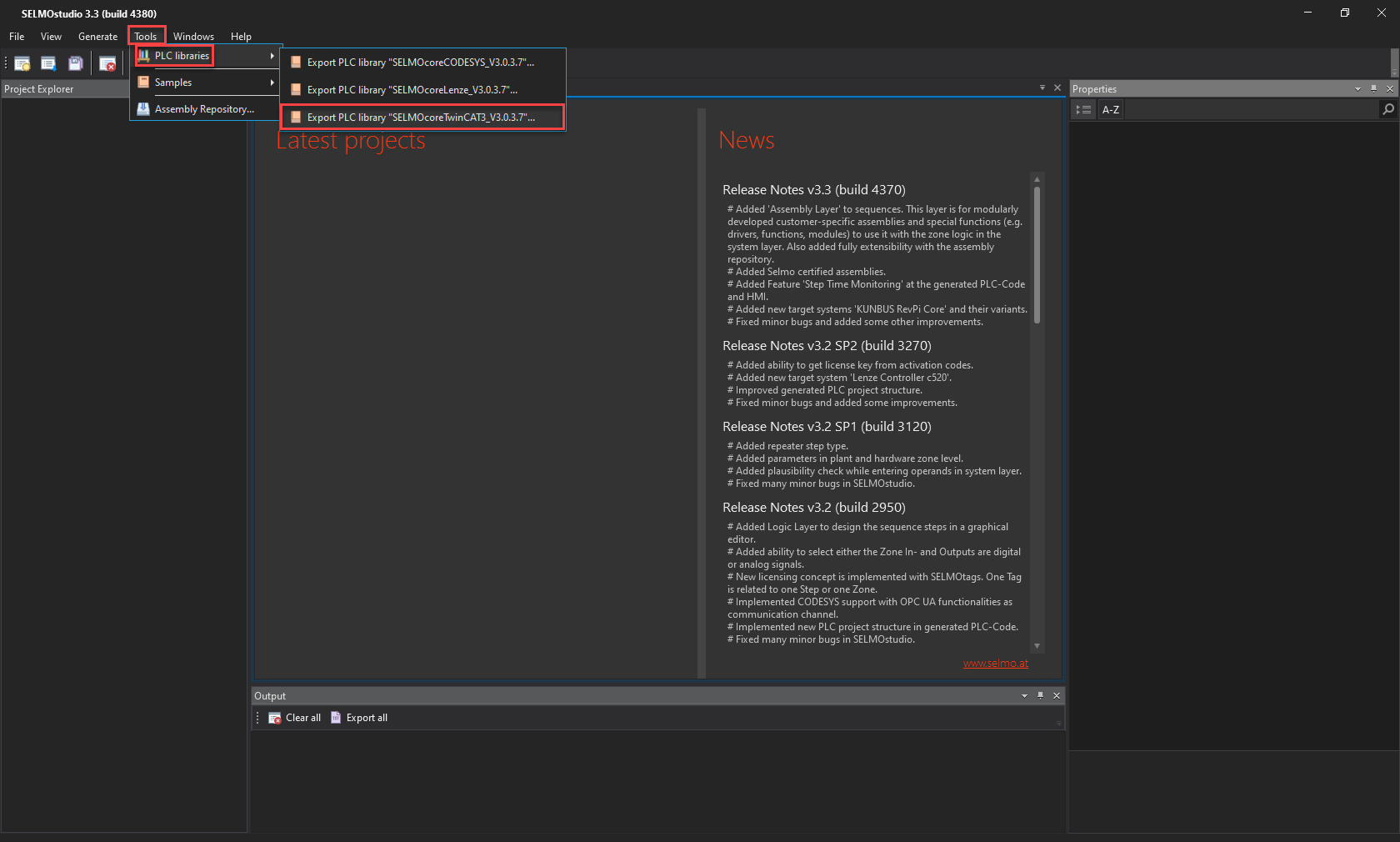
You can find the latest version in our Selmo studio:
Save all changes:
Load the project and start the PLC:
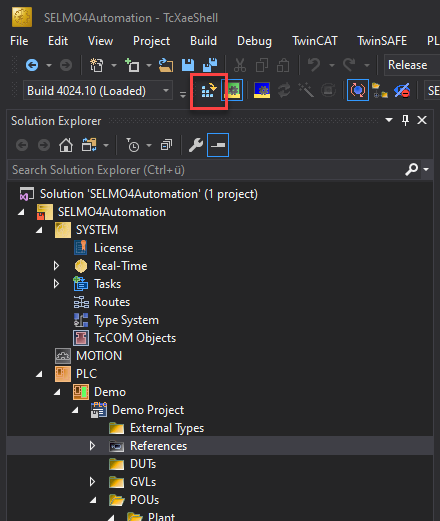
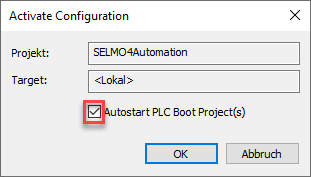
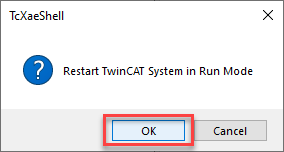
The project is now loaded and the PLC jumps into RUN mode.
![]()
![]()
You can log in here:

The application is executed on the controller.
![]()