Zones allow us to define and control different areas of a system. Zones can be configured differently depending on the application and requirements. It is important to understand the functions and properties of the different zone types. In this section, the zone types In, InOut, Out. and Mem are explained, and their possible applications are shown. It also describes the operands that can be used in a zone to trigger or check certain actions.
Include sensor
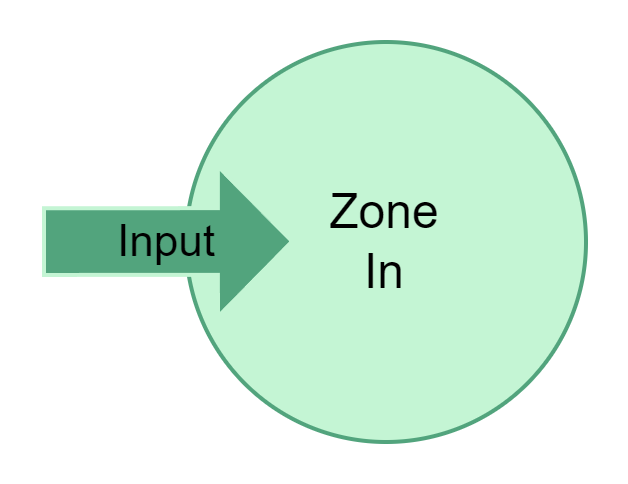
To include a sensor in your application, you must use the Zone-In. The sensor sends only one input signal to the system; this is monitored with the Zone-In and the negated Zone-In on high and low.
Examples of sensors that can be integrated with a Zone-In:

Inductive sensor

Switch

Push button

End position sensor

Light barrier
Integrate actuator with feedback
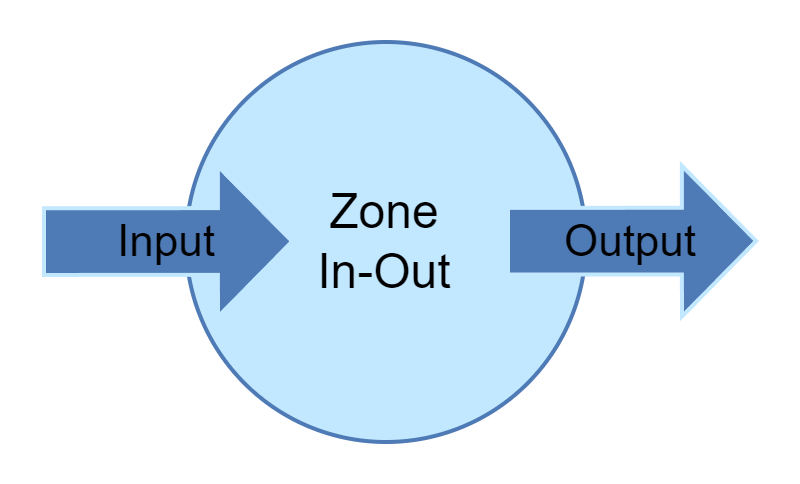
The Zone-InOut switches an output and expects feedback that the function controlled by the output has been executed.
Examples:
•Cylinder valves "Extend" is switched: The Zone-InOut expects the end position sensor of the cylinder as input.
•Servo motor "Move to position 1" is switched: The Zone-InOut expects the signal that the axis is in position 1 as input.
•Frequency converter "Speed 1" is switched: Zone-InOut expects as input the signal that the frequency inverter has reached the speed.
Examples for sensors that can be integrated with a Zone-InOut:

Frequency inverter

Cylinder

Servo motor

Stepper motor

Regulation
Integrate actuator without feedback
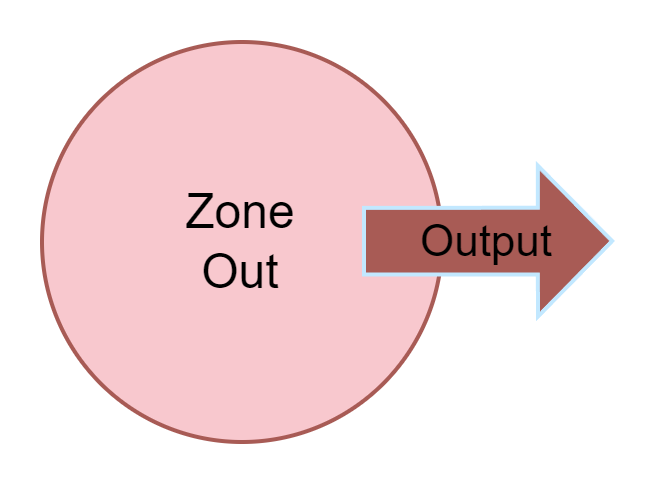
The Zone-Out switches actuators and does not expect feedback, i.e., it operates pure switching logic. This zone type is mainly used for lights and signals, but also for actuators that have no feedback. These, however, should be avoided, if possible, through technical means as they lead to uncertainties in the process.
Examples of sensors that can be integrated with a Zone-Out:

Alarm light

Signal horn

Staff light

Signal lamps

Cylinder without feedback
Integrating flags
The zone mem is used as a flag to remember executed process steps. It always consists of two zones, the first sets and checks the flag to high, the second resets the flag and checks the flag to low.